
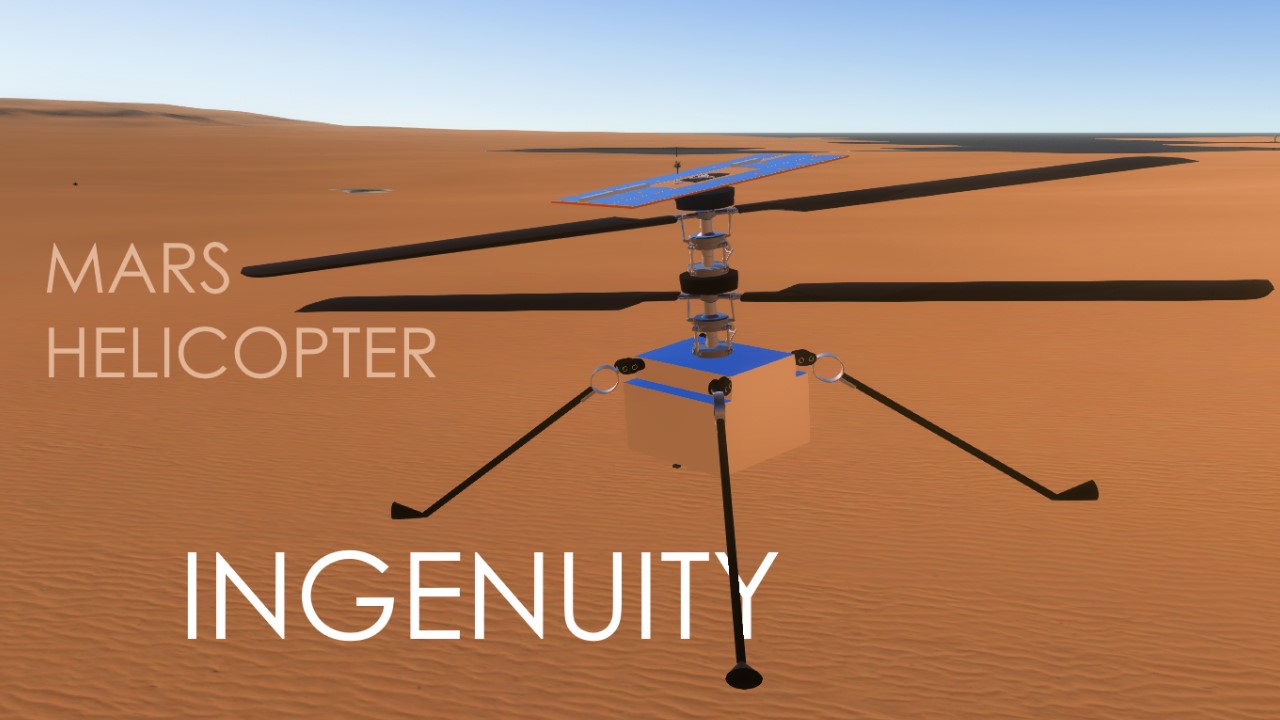
NASA's Perseverance rover and the helicopter Ingenuity safely landed in the Jezero Crater on Mars on February 18, 2021. Ingenuity is a craft designed to test the possibility of powered flight in Mars' atmosphere. It will also scout for potential points of interest for Perseverance and future rovers/missions. Ingenuity has a maximum flight time of 90 seconds per flight and is expected to perform up to 5 flights over the course of 30 sols (Mars days). The flights likely will progressively get more complex, with the first one probably being taking off, hovering, and landing again, and the final flight maybe performing a short low-altitude flying around through the area, all while collecting telemetry flight data and taking pictures. All flights will be conducted automatically by Ingenuity due to the delay in radio communications between Mars and Earth. If successful, Ingenuity will be the first craft to accomplish controlled flight on another planet.
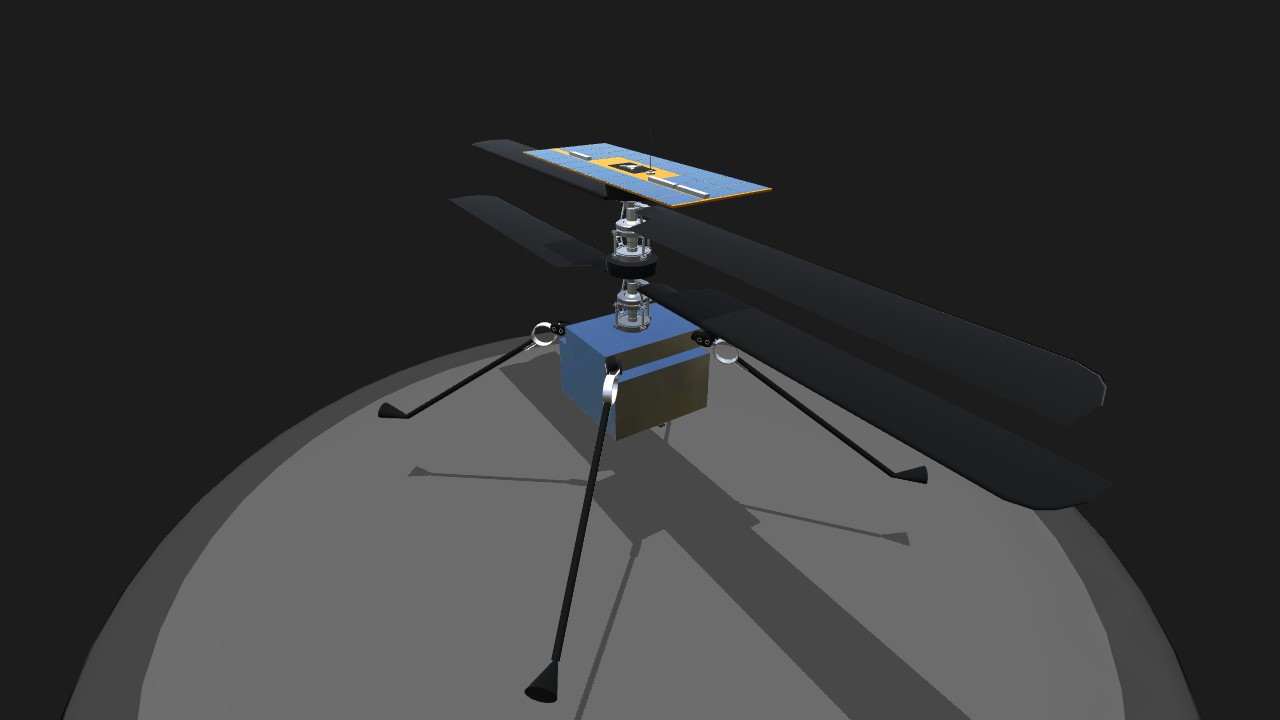
I created this not to scale; irl it's much smaller. It can achieve speeds much greater than it should be able to. The CoM is slightly forward so you'll need to counter with minor pitching back to stay in place (you can fix this if you wish by setting asymmetric parts' massScale to 0, and centering the cockpit) For the most stable (and realistic) flight, stay at moderate-slow speeds with easy turns. This is my first time making a helicopter/drone, so commenting ways to improve it is appreciated.
Uses standard helicopter controls:
Throttle for rotor power;
VTOL to control vertical speed;
yaw, pitch, and roll do, you guessed it
Lastly there's one camera on the bottom, which also sort of helps to let you know which way's forward
Specifications
Spotlights
- SyntheticL 4.9 years ago
- Sarnnox 4.9 years ago
- ShiroNeko 4.9 years ago
- MetalManiac54 4.9 years ago
- Grandma 4.9 years ago
- RandomUser09 4.9 years ago
General Characteristics
- Created On Windows
- Wingspan 23.1ft (7.0m)
- Length 41.1ft (12.5m)
- Height 17.3ft (5.3m)
- Empty Weight 5,043lbs (2,287kg)
- Loaded Weight 8,037lbs (3,645kg)
Performance
- Power/Weight Ratio 5.591
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 6260
Parts
- Number of Parts 125
- Control Surfaces 0
- Performance Cost 472
@Sweppingkid29withsp I don't know what you mean. You can look up videos on how Ingenuity works, like I said there's an atmosphere on Mars.
@Sweppingkid29withsp Mars has an atmosphere. Sure, less than 1% the density of Earth's, but nevertheless an atmosphere. And where there's an atmosphere there's a possibility of powered flight. Ingenuity is named what it is because of the creativity the team put into the helicopter so that it may fly in such conditions.
@mezmer I totally understand the scale issues there but nonetheless I would be delighted if you did
@mezmer enthusiastic. Love that. Also this is the best replica of an aircraft i had ever seen. Also hit me up on discord : CB#9747 . Lol
@Reeeeeeeeeeee45 Maybe, the rover obviously is a lot more detailed than the helicopter, and I would need to either scale down the whole helicopter, or make a huge Perseverance based on this one. I've never made a rover before, so I guess it would be interesting
Would you consider making the whole rover and copter?
@CB76565 Thanks for the tips. I set "zeroOnDeactivation" for the rotors to "true," which deleted the XML property, but for me they still take forever to stop rotating at 0% throttle. Regarding the CoM, I also think that setting the mass of the asymmetric parts on the solar panel unit to 0 would also help balance it, as well as centering the cockpit. You're right about gyroscopic stability 250% actually being more stable than 500%, I thought a higher value would be better but I guess not lol
Mass disbalance due to camera. (Fixed it by setting the XML mass scale to 0)
Rotor XML's "zeroOnDeactiavtion" is set to false. Making it take way longer to turn off blades that to turn then on (fixed by turning then into true)
The "500" stabilization in the gyro makes the craft unstable while on bank angel of 30+ (Fixed that by taking the stability to 250 [safe])
NASA intensifys
lol I just realized the bottom rotor is floating a bit, don't you love it when you attach parts and there's still some space between them
wheeeeooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooooaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaaakkkkaaaaaaaaaaaaaaaaaaaaaaaaaaaaa
Is ok @2. Another fact that will screw your perception of size in space: the moon has enough surface area to cover all of Asia.
@snekpilot oh
@2 actually it’s slightly smaller. About two thirds the size of earth.
You should check out my mars rover, DUAXEL.@mezmer
Mars...soon to become earth 2.0 (jk)
Well it’s the same size as the earth
Ah yes.
Awesome