
Specifications
General Characteristics
- Created On Android
- Wingspan 77.8ft (23.7m)
- Length 99.3ft (30.3m)
- Height 29.3ft (8.9m)
- Empty Weight 28,351lbs (12,859kg)
- Loaded Weight 28,351lbs (12,859kg)
Performance
- Horse Power/Weight Ratio 0.74
- Wing Loading 189.4lbs/ft2 (924.8kg/m2)
- Wing Area 149.7ft2 (13.9m2)
- Drag Points 17077
Parts
- Number of Parts 416
- Control Surfaces 1
- Performance Cost 1,328
@Stingray Yeah, jets are the way to go.
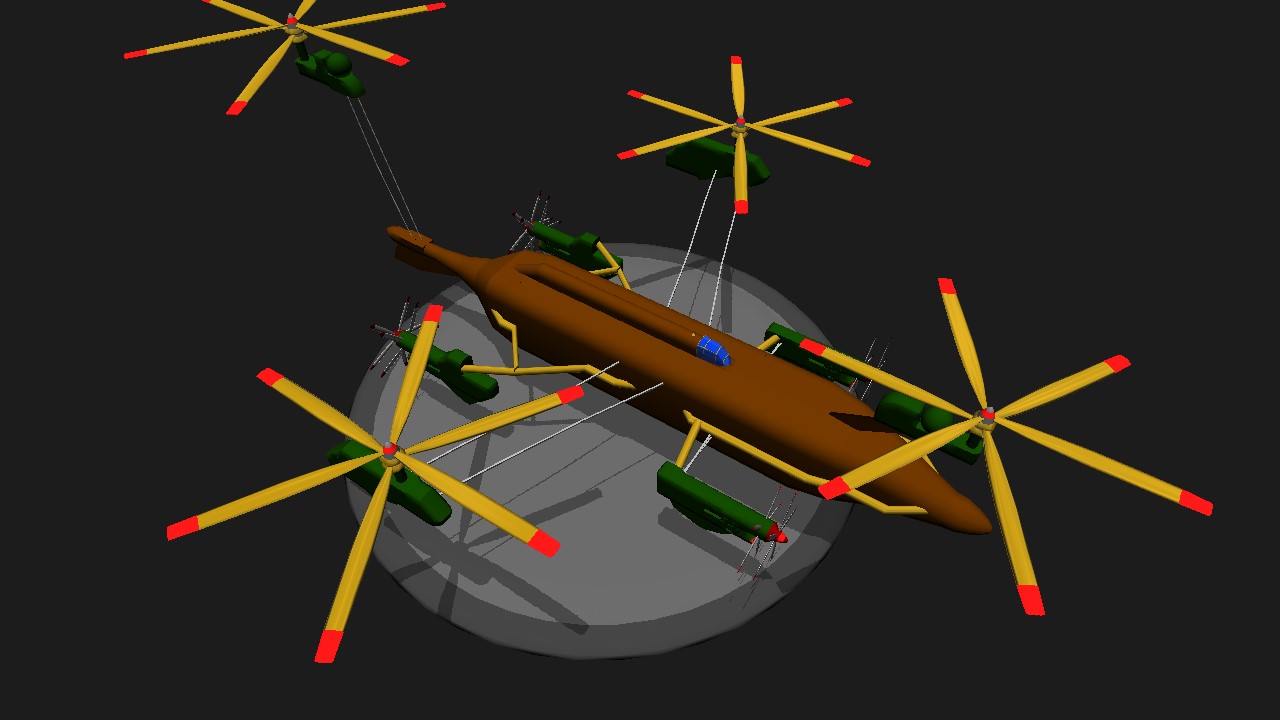
Ah! I mean stable, level vertical rising to at least 1,000 feet. The 4 gyros allow this even with com in front of col. This design can still be tweeked, but I'm moving on from simple quad/drone models to VTOL jet models. @SledDriver
@Stingray By "won't go VTOL" you mean it won't rise? When the thrust equals the mass, that means it'll stay in place. To make it rise or fall you have to have additional thrusters/props that you only engage when you want to change altitude.
@SledDriver Thank you. Yes, I modified both front and rear lifts. This nose-up behavior is a controllable compromise. Any less lift (±50 hp) and this monster won't go VTOL. Need an upgrade in rotor design, if I stay with this base body.
You can make the thrust of your upward lifting engines equal to the mass of the aircraft, which will give it stable hover (not rising all the time). Then add two small thrusters/props to enable moving up and down.