

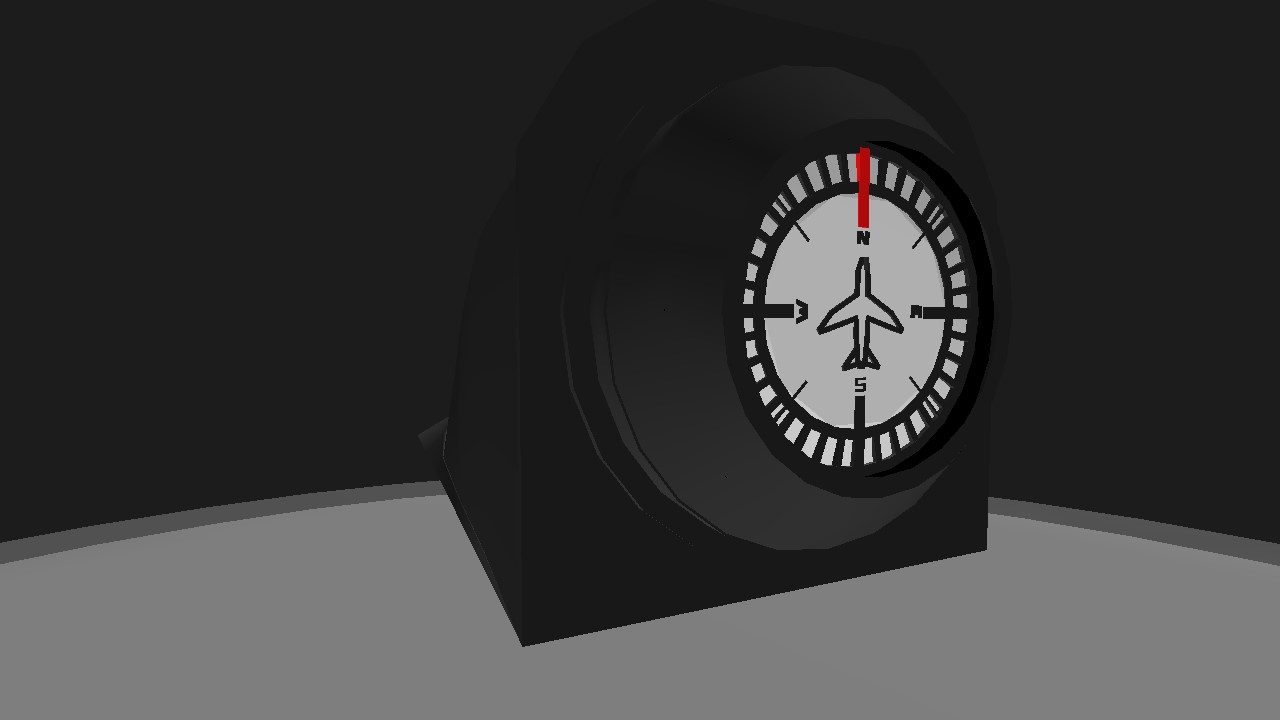

Pretty self explanatory. Just a fancy compass for your aircraft. BackLit and all that.
As usual
You are free to use this but crediting the post would be a nice replayment.
[Yes this is officially a series now. I ll try to make and upload well detailed cockpit instruments as much as I can. Next up: Air speed Indicator]
Specifications
Spotlights
- PlaneFlightX 5.6 years ago
- Mustang51 5.6 years ago
- abhishektyagi055 5.6 years ago
General Characteristics
- Created On Android
- Wingspan 1.6ft (0.5m)
- Length 3.6ft (1.1m)
- Height 1.6ft (0.5m)
- Empty Weight 561lbs (254kg)
- Loaded Weight 561lbs (254kg)
Performance
- Wing Loading 439,839.3lbs/ft2 (2,147,483.6kg/m2)
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 131
Parts
- Number of Parts 91
- Control Surfaces 0
- Performance Cost 234
STEEEEEEEEEEEEEEEEAAAALLLLLLLLLLL
true true, I'll give it some more work
@Flightsonic Well then, atleast we tried right?
@DPain I'm actually baffled as to why it does lose calibration, I had a sneaky suspicion that it was in that range. At first I thought it was due to slip or something but that can't be so because yawrate would only read out the change in yaw, and it doesnt matter the heading
@Flightsonic It bas 2 main problems as far as I can tell. It read out in the posetive direction pretty well for a while but as soon as you try to go the opposite direction from the begining it fails. And it looses calibration in about 180 - 260 degrees of hard turning. But other than that the code works perfectly.
smooth(Heading,clamp01(Time<1)*10000)+
smooth(0,cos(RollAngle)*YawRate+sin(RollAngle)*PitchRate)
Here's the closest I've got, works accurately for to most part but some drift arises,
smooth(Heading,clamp01(Time<1)*10000)- The origin offset, works at any anglesmooth(0,cos(RollAngle)*YawRate+sin(RollAngle)*PitchRate)- Supposed to give a rate of change of calculated heading, as to avoid the issue of heading going +180 to -180, I think slip is what is messing it up.If you are you are sure about it then this should be used, but I d suggest testing the smooth once yourself cause I couldnt get it to work
Nope I haven't, think I'm close though
I actually got it I think
I think I'm getting close to getting it, I'll give you the code once/if I do, the coordinate singularity of pointing straight up/down is a problem tho
@DPain the smooth(Heading,clamp01(Time<1)*10000) locks the starting value for heading, So smooth will determine the rate which the value based on heading will change, which will be near instant at the start, but once Time>1 (which clamp01 makes sure it's 0 not -1) the value cannot change even if heading does, so we can then determine our rate of change of heading after this function
@Flightsonic or, you can just use "Time < 1" for activation and heading/180 for the input. Cause it doesnt need to go more than 180 degrees for the starting offset. And dude dont worry this isnt spam in anyway.
@DPain think I found a way to do the starting offset, smooth(Heading,clamp01(Time<1)*10000)
then + whatever will make it track
and sorry to spam with this lol
@Flightsonic Well if you can get outta the big sad then it would be a great help
@DPain I could try but quarantine hours be hittin
@Flightsonic I can though. The first or the spawn rotator can be deactivated with a time command, I can rig the rotator to deactivate after 2 seconds of loading up the level. But I am not sure if I have the knowledge to actually calculate the yaw rate and make it flat by deducting the roll and pitch values.
@DPain the rotator has the hold the position, which I'm no too sure you can do with funkytrees?
@Flightsonic I didnt get offended or anything I am just trying to perfect the system, for instance it could use a seperate rotor to determine what direction it is facing when spawned and then the other motor takes over that calculates the diviation based on yaw rate
@DPain yeahh, that's where it gets tough, good work on this though, don't mean to sound negative
@Flightsonic wouldnt that only work then if you spawn in facing 0 degrees?
@DPain the way around may be to calculate heading based on the rate of yaw, but that would also have to calculate in pitch and roll in to flatten it, or something
The display is very well detailed, it must have been a pain to make. Well done.
good job
@jamesPLANESii Its based on a google image I found of a heading indicator. And the code is
Heading/360as the input, with min/max at -2/2.@Flightsonic It just has to recalibrate at every 180 degrees. I am unsure if there is a way around it. If I find one I ll definetly implement it in the next version.