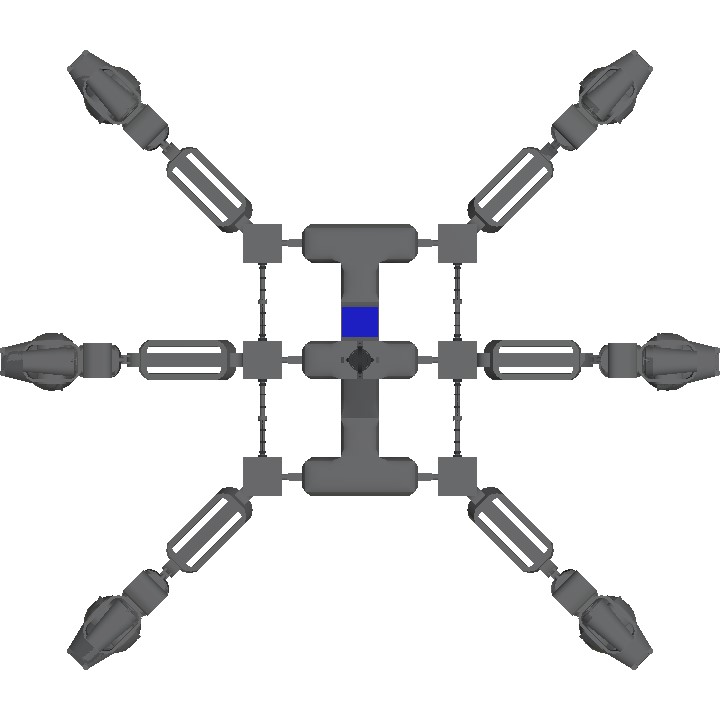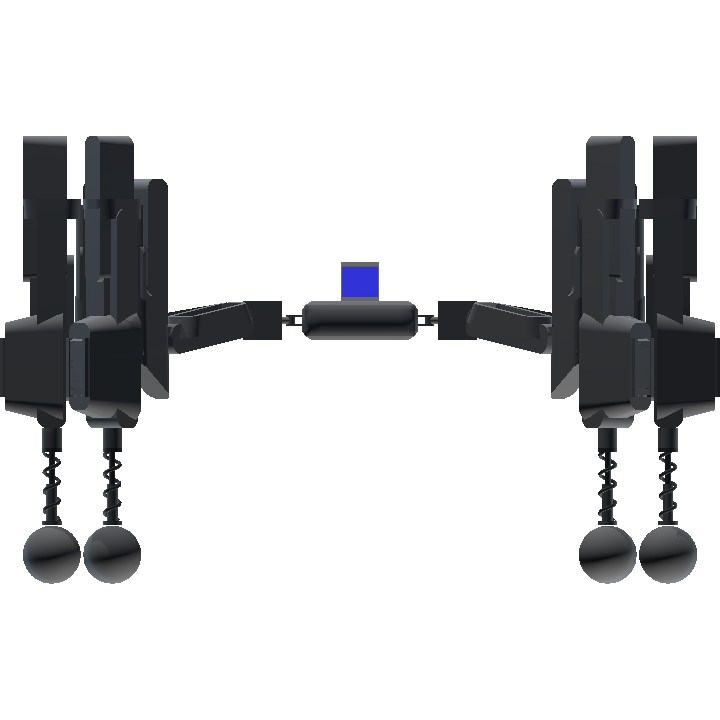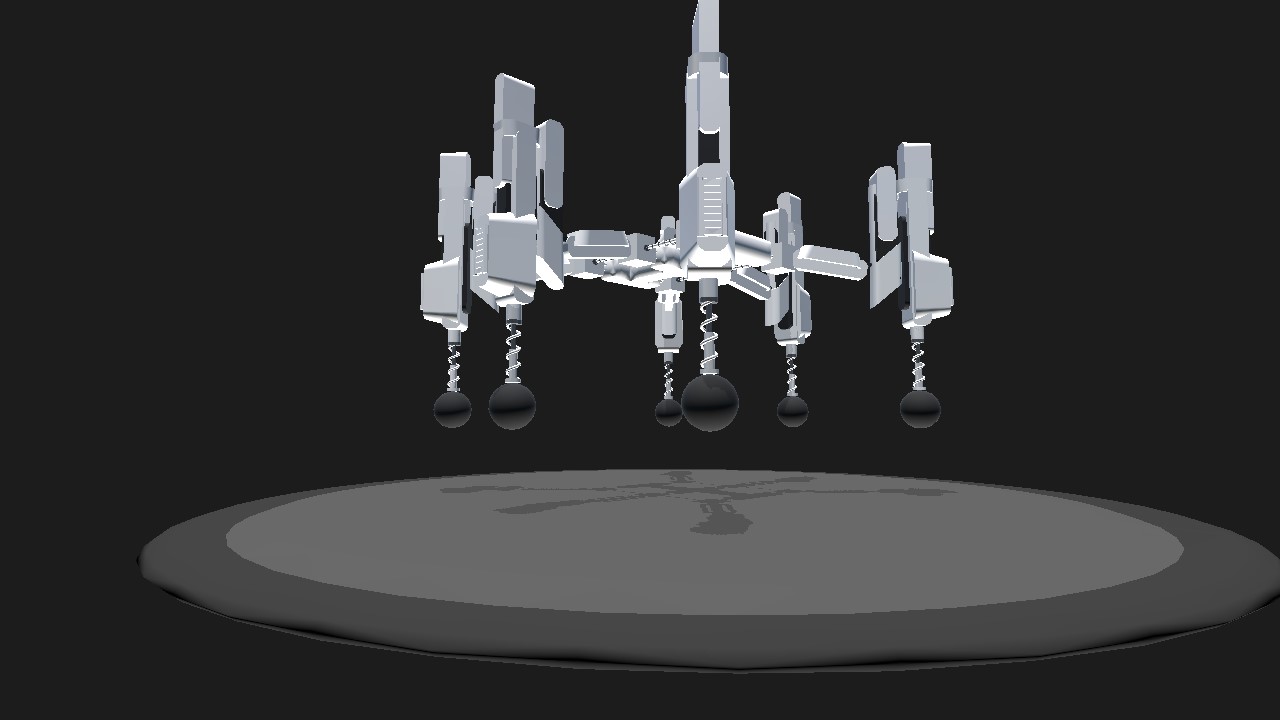
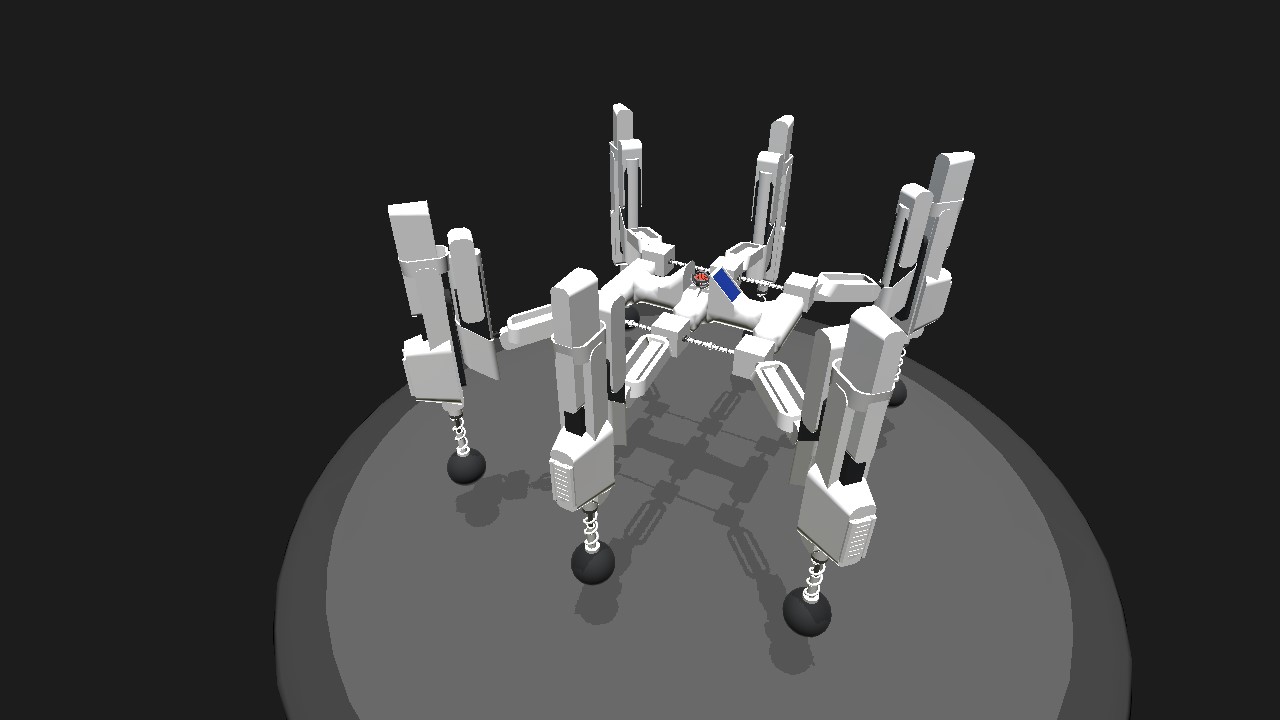
PLEASE HELP ME WITH THIS...IN Short: I'd like help getting the proper general walking inputs for hinge rotators needed to make a functional 6 legged robot that functions as any real mechanical-robotics hexapod would so that I don't have to keep basically stealing others build designs to try figuring it out because I'm clearly getting nowhere with this.Detailed Information: The Roll and Pitch combined is why I used pistons for rotational turning aka Y-axis turning using Roll because I can't seem to get any proper inputs for the hinge rotators at the base of each leg. But there's also been many other issues with it ever since I tried using 6 legs instead of 4 it just doesn't move the way that I want it to cause I don't know what to use for inputs on each hinge for walking and turning movements-functions, so far all I've really done is download and try copy-pasting inputs of any publicly posted mech like machines and as you can see this isn't doing what it would do if it were a real fully functional robotic hexapod, so I'm asking anyone who downloads or reads this please help me do what I clearly cannot currently do with this idea, help me in any way you can is all I ask whether it be sending me some hinge inputs needed for it through comments, or reposting a fixed version of it without the pistons, just anything that anyone seeing this can do or is willing to do that might help me with this I'd be greatful.
Specifications
General Characteristics
- Predecessor Hexapod
- Created On Android
- Wingspan 30.3ft (9.2m)
- Length 26.3ft (8.0m)
- Height 18.9ft (5.8m)
- Empty Weight 13,890lbs (6,300kg)
- Loaded Weight 15,907lbs (7,215kg)
Performance
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 5385
Parts
- Number of Parts 138
- Control Surfaces 0
- Performance Cost 768