

No Tags
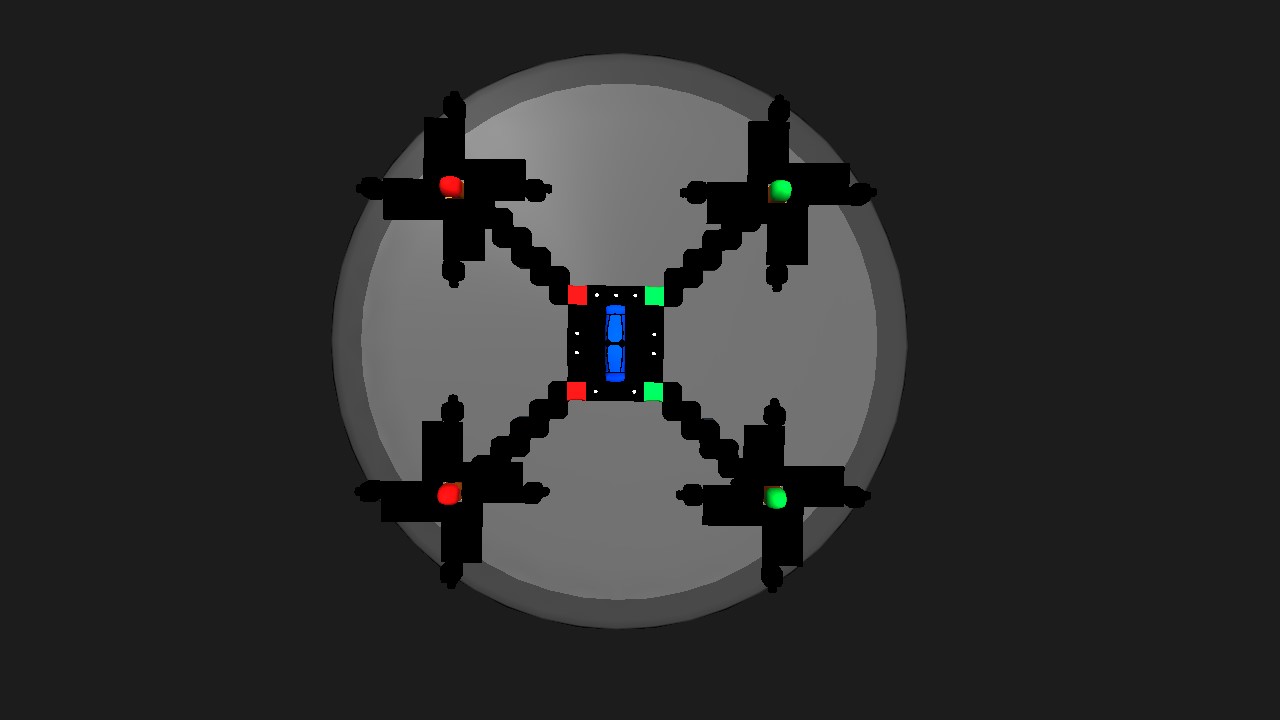
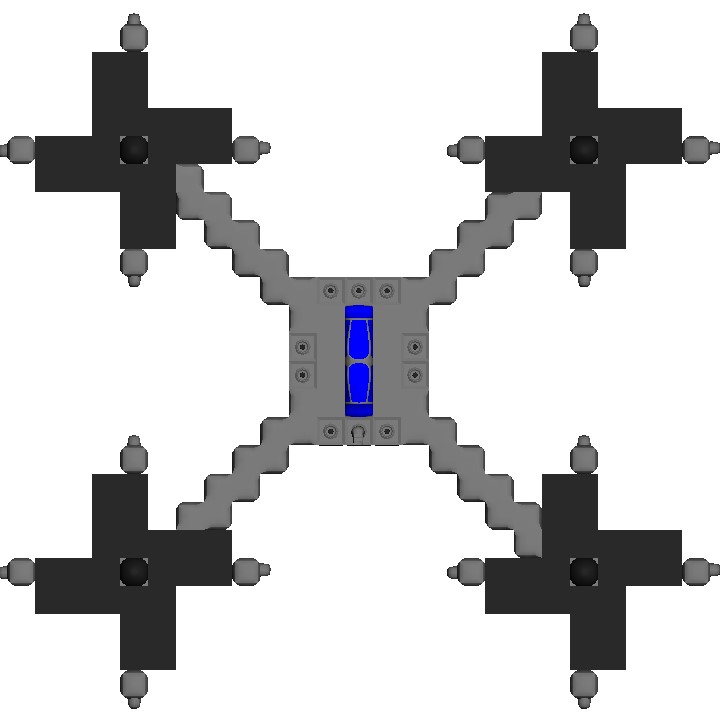
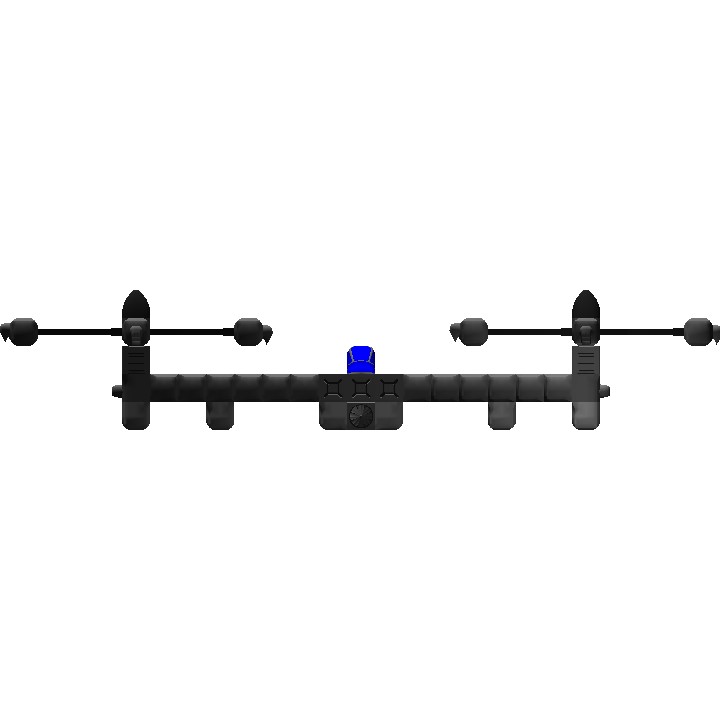
This is a quadcopter I have made. It flies pretty stable. To control it use throttle to 75% to 100% and set vtol slider to just above or below the center mark. Use yaw to control the rotation, roll to roll, and pitch to control speed and pitch. This is pretty much indestructible as long as you crash with the copter parallel with what you are hitting. Enjoy!
Specifications
General Characteristics
- Created On Android
- Wingspan 42.0ft (12.8m)
- Length 40.4ft (12.3m)
- Height 8.2ft (2.5m)
- Empty Weight 7,451lbs (3,380kg)
- Loaded Weight 9,323lbs (4,229kg)
Performance
- Power/Weight Ratio 1.446
- Wing Loading 36.1lbs/ft2 (176.2kg/m2)
- Wing Area 258.3ft2 (24.0m2)
- Drag Points 15518
Parts
- Number of Parts 154
- Control Surfaces 0
- Performance Cost 367

- Log in to leave a comment
-
66 PranksterplanesAmazing I love it it's easy to fly 1000000/1010.0 years ago
-
16.2k LordofLegoFirst helicopter I could actually fly10.0 years ago

