
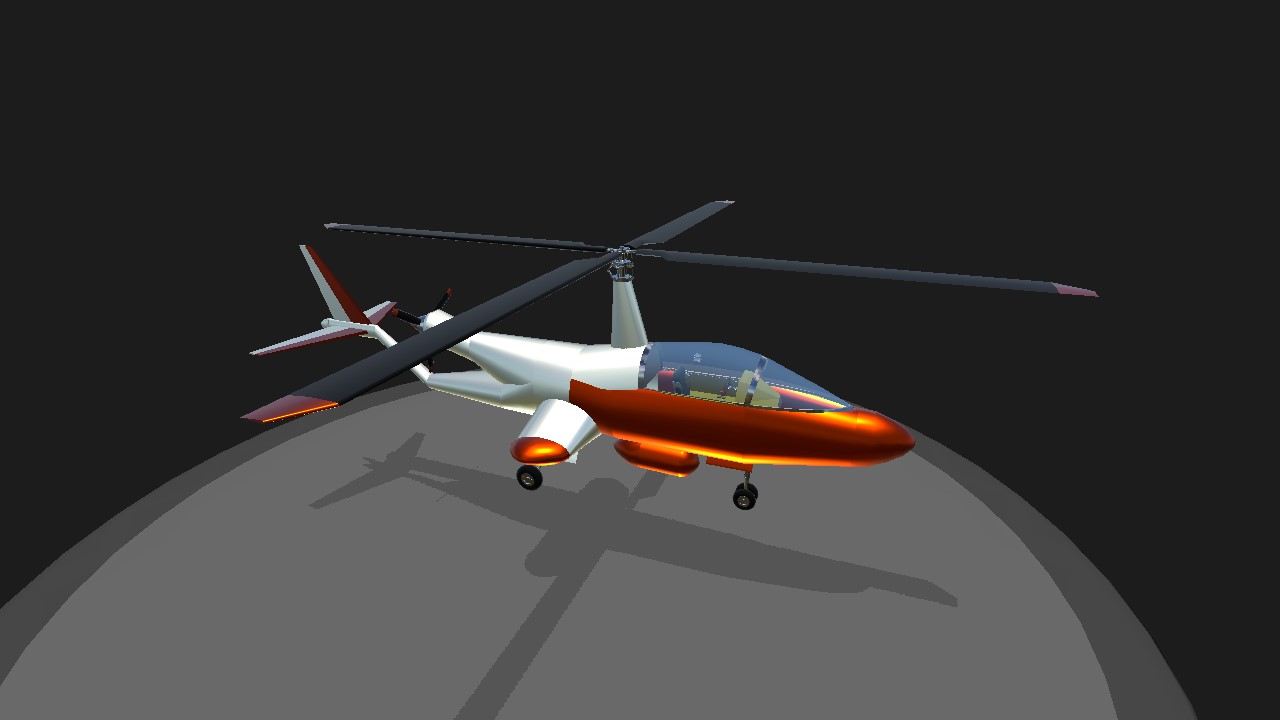


Here is a weird little autogyro I made as an experiment. I know next to nothing about helicopters, but this flies okay! You can power up the main rotor before takeoff or use the runway with full throttle and full pitch up to get the rotor up to speed. When you want to take off just ease back on the collective until you lift off, keeping an eye on your main rotor speed to make sure it's up above 1000 RPM. If you power the main rotor up to speed, don't take it above around 1500 RPM under power or you'll spin around on takeoff. Main rotor power should be off during flight!
Experiment with combinations of trim and collective to achieve level flight, and autorotate for landing.
Any control notes are welcome - again, my knowledge of helicopters is basically non-existent.
Specifications
General Characteristics
- Created On Android
- Wingspan 35.4ft (10.8m)
- Length 36.8ft (11.2m)
- Height 12.2ft (3.7m)
- Empty Weight 2,416lbs (1,096kg)
- Loaded Weight 3,125lbs (1,417kg)
Performance
- Power/Weight Ratio 3.595
- Horse Power/Weight Ratio 0.479
- Wing Loading 136.6lbs/ft2 (667.1kg/m2)
- Wing Area 22.9ft2 (2.1m2)
- Drag Points 3068
Parts
- Number of Parts 58
- Control Surfaces 3
- Performance Cost 432


