
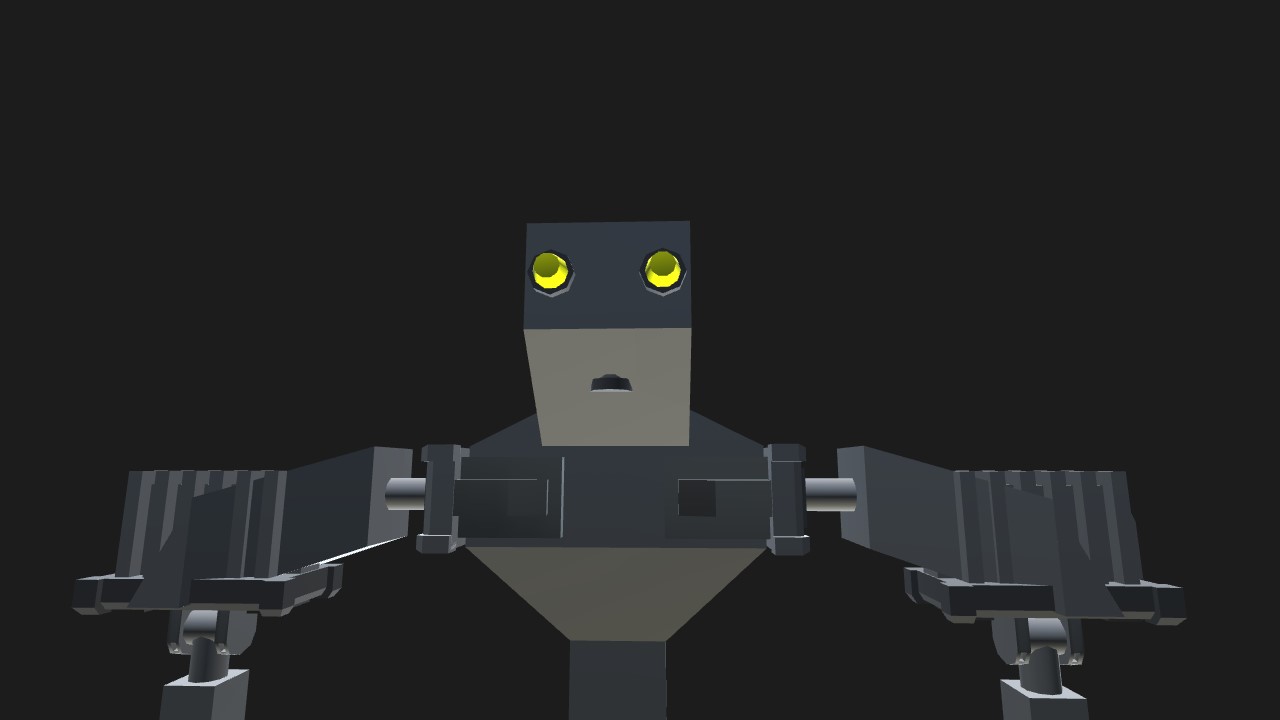
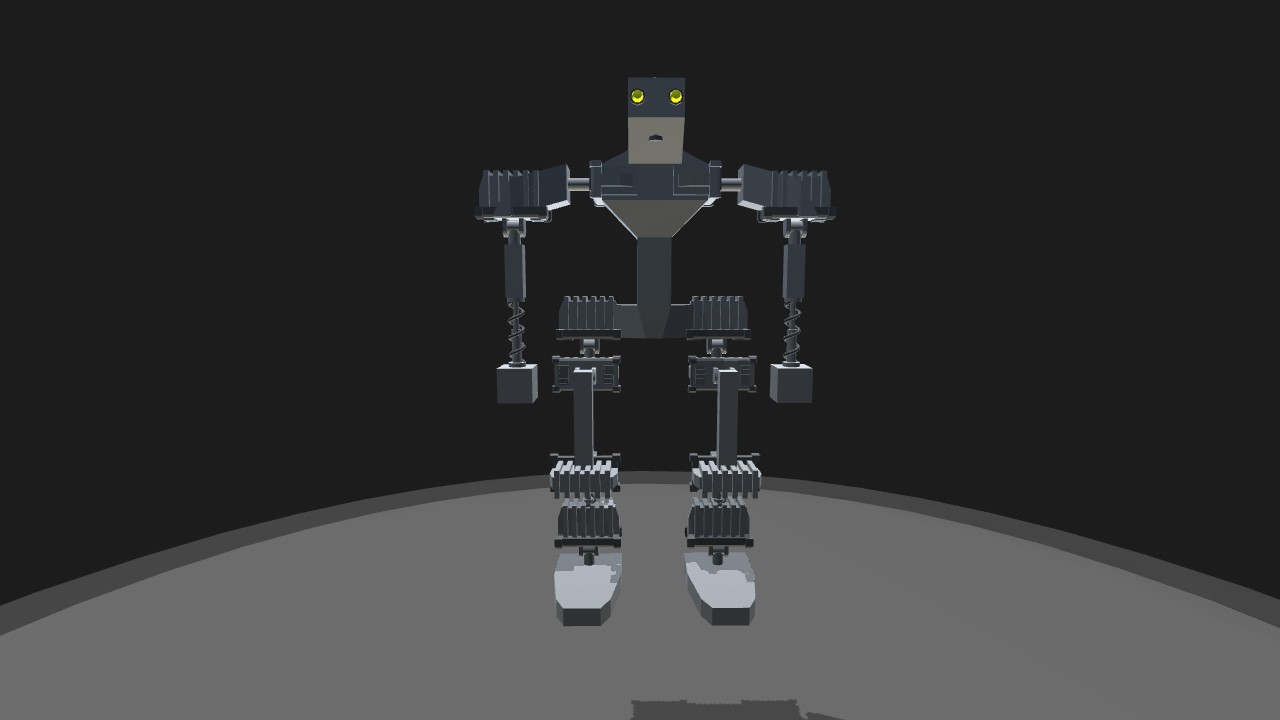
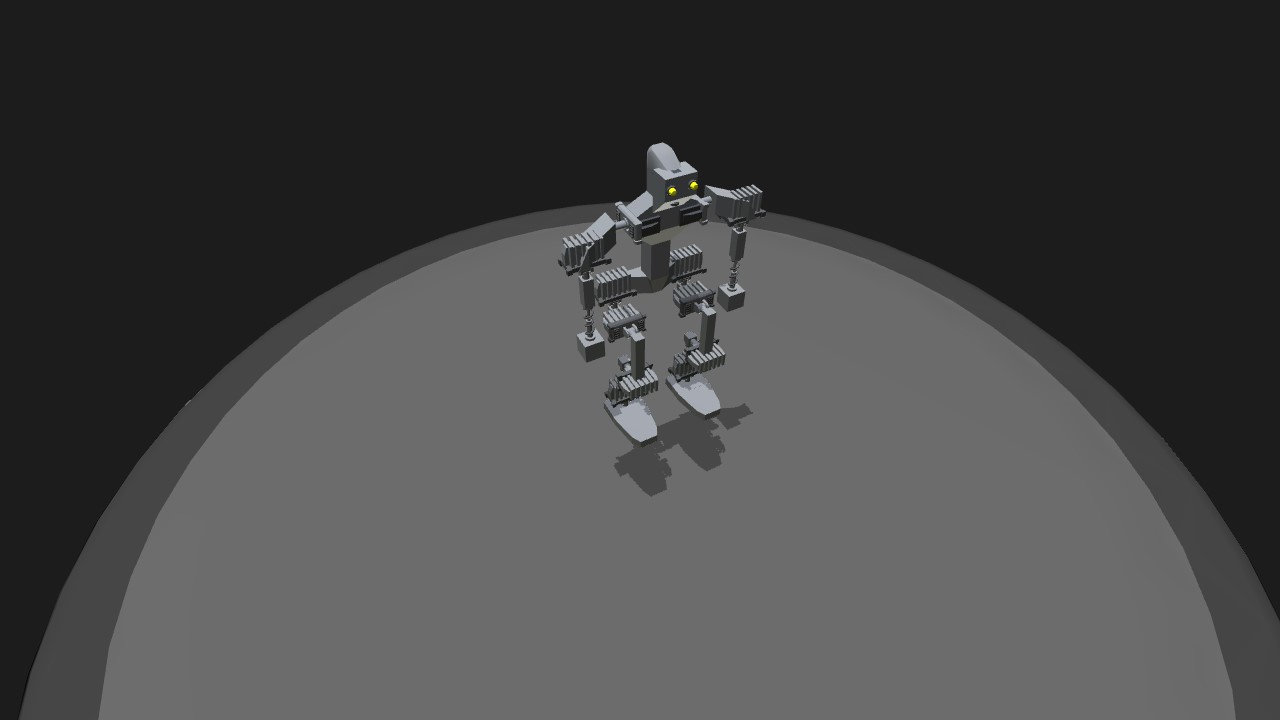
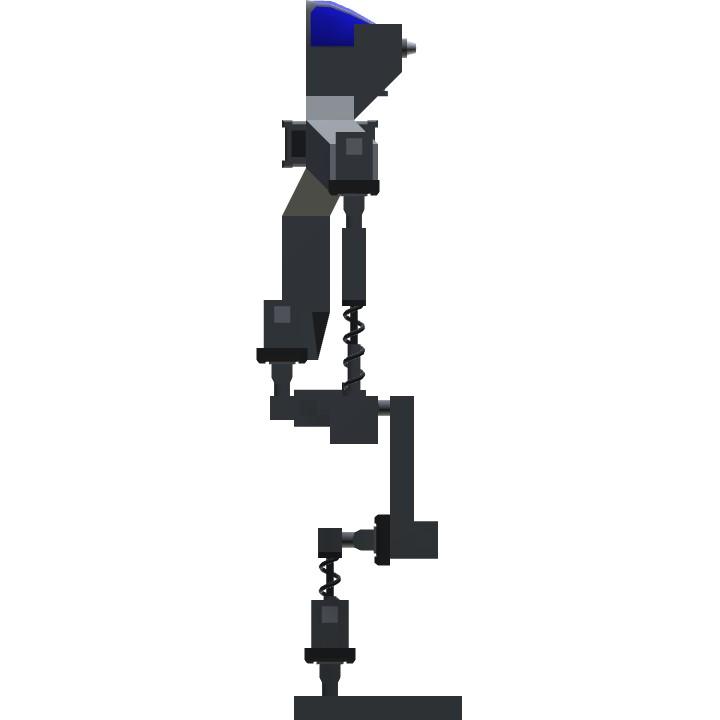
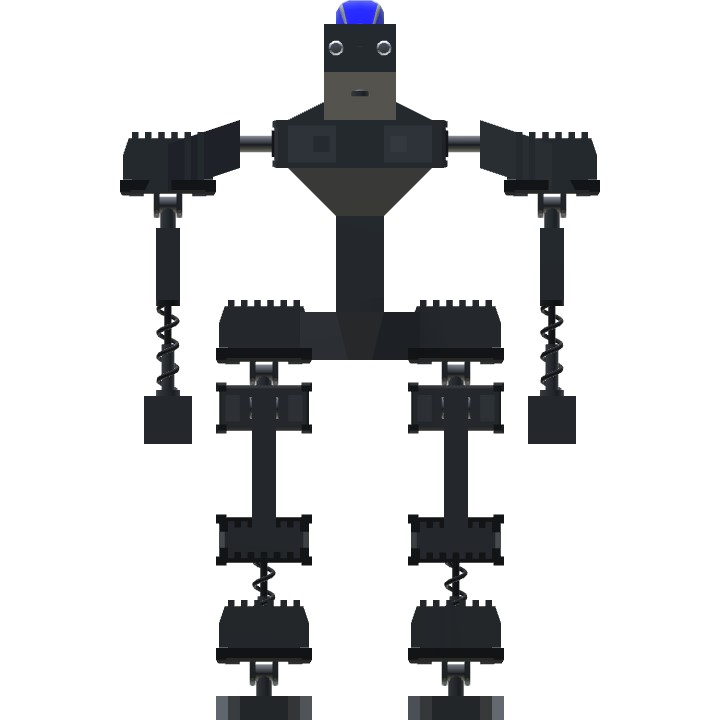
Just an early prototype of a bipedal walker im trying to make that doesn't use hidden supports. It still has a long way to go as you can probably tell. The contol scheme is odd. Pitch up for one leg and roll right for the other leg. alternate in a quick rythim. You'll get the hang of it after a couple minutes. If you fall over use VTOL for the arms. Mobile users might have a tough time with this. It'd be great if someone could help me improve upon this design, or make a better one.
Specifications
General Characteristics
- Created On Windows
- Wingspan 8.2ft (2.5m)
- Length 3.5ft (1.1m)
- Height 12.3ft (3.7m)
- Empty Weight 7,899lbs (3,583kg)
- Loaded Weight 7,899lbs (3,583kg)
Performance
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 3926
Parts
- Number of Parts 59
- Control Surfaces 0
- Performance Cost 372
@Eagleinc
No problem M8. I really enjoyed building that toolcat so the pleasure was mine :D
@Eagleinc
Ok sounds cool. Are you building a prototype right now?
@Eagleinc
Oh yeah those are sweet. How would we do a colab though?
@Eagleinc
What'd you have in mind?