

No Tags
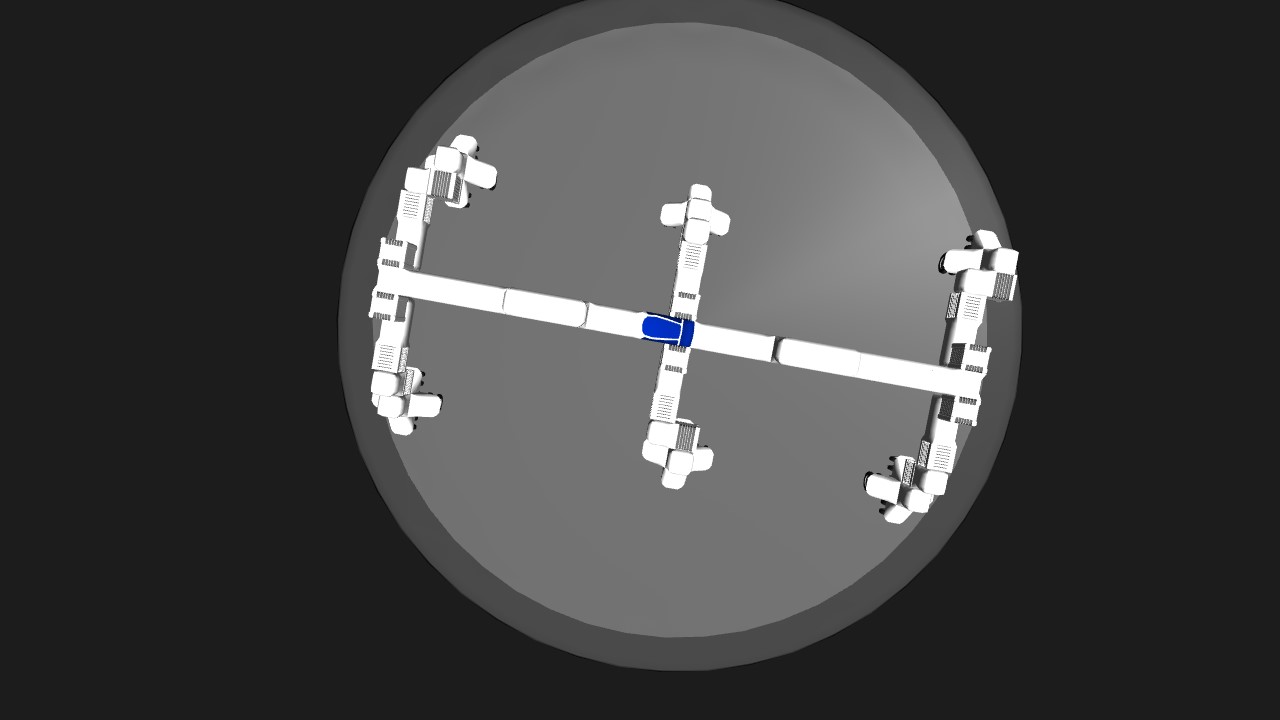
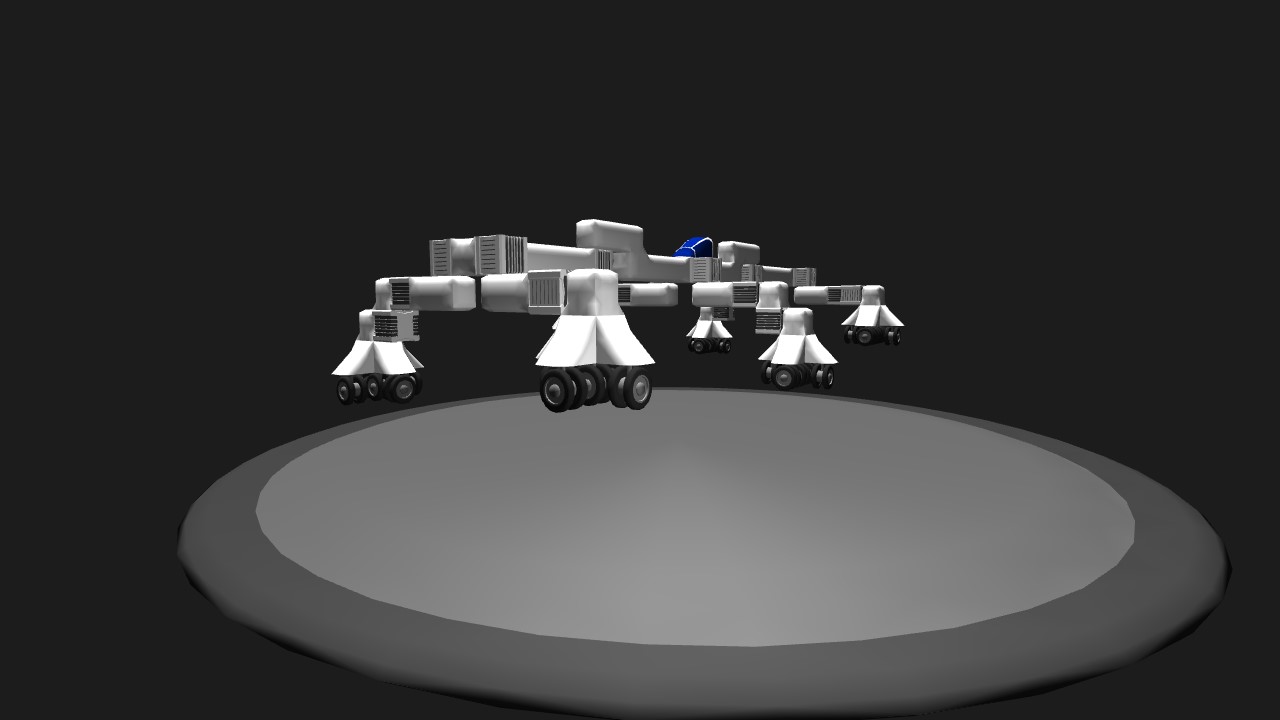
it actually works. reliable walking motion. mostly controllable. TO USE, yaw left and hold, then roll (right for forwards walking, left for reverse walking) release yaw, then roll all the way. hold yaw left again, roll all the other way then release yaw and roll all the way back, repeat that motion. vtol slider to steer. I hope someone turns this into something cool. *please rate, comment and check out my other contraptions. thank you*
Specifications
General Characteristics
- Created On Android
- Wingspan 21.3ft (6.5m)
- Length 42.7ft (13.0m)
- Height 9.8ft (3.0m)
- Empty Weight 8,201lbs (3,720kg)
- Loaded Weight 8,201lbs (3,720kg)
Performance
- Wing Loading 439,839.3lbs/ft2 (2,147,483.6kg/m2)
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 16171
Parts
- Number of Parts 130
- Control Surfaces 0
- Performance Cost 1,065
- Log in to leave a comment
-
15.9k AllstarInteresting concept10.0 years ago
-
4,857 Katrina@JoshuaW i agree walking it is a faff. but im hoping it inspires others to use the ideas, and develop a fully operational, easy to use walking machine. thank you for the 5 stars.10.0 years ago
-
51.8k JoshuaWPretty cool and it does work, not very easy to use though.Nice work.10.0 years ago

