

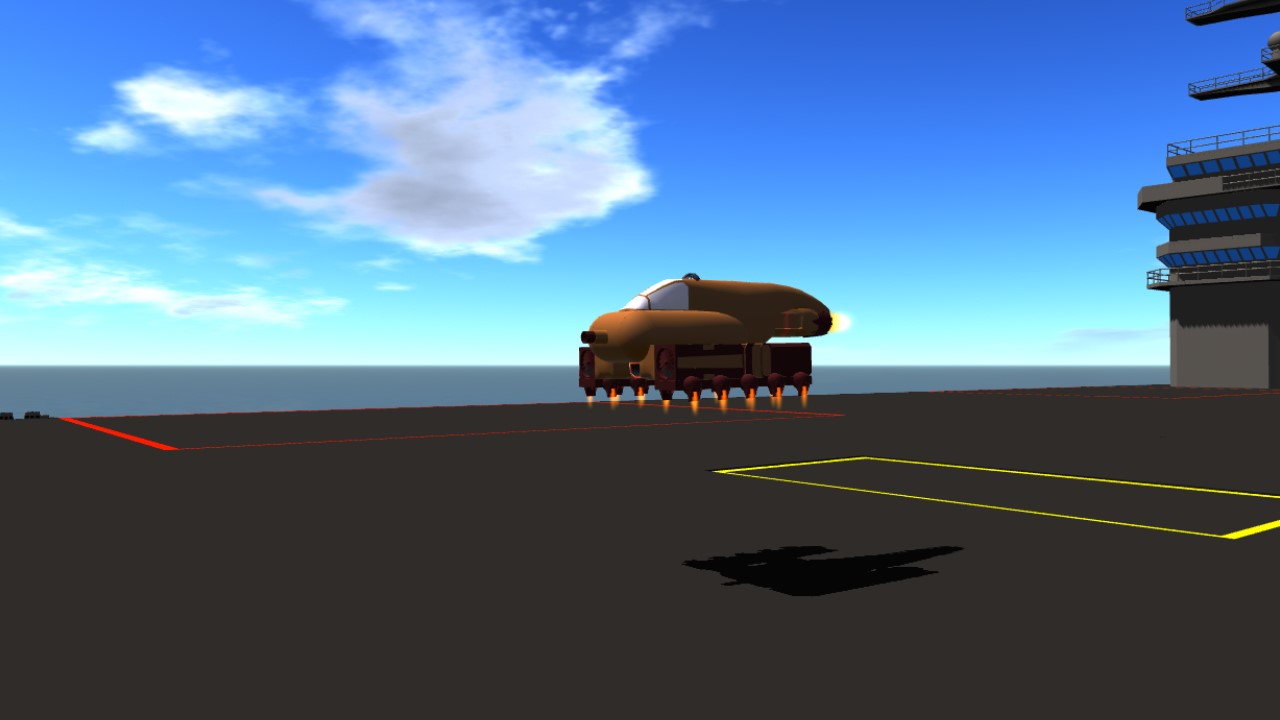
it does hover, indeed
this is a temporary state of this build to test the engines, as im planning to make a (very, very, very) functional cocpit and improve the overall aestethics
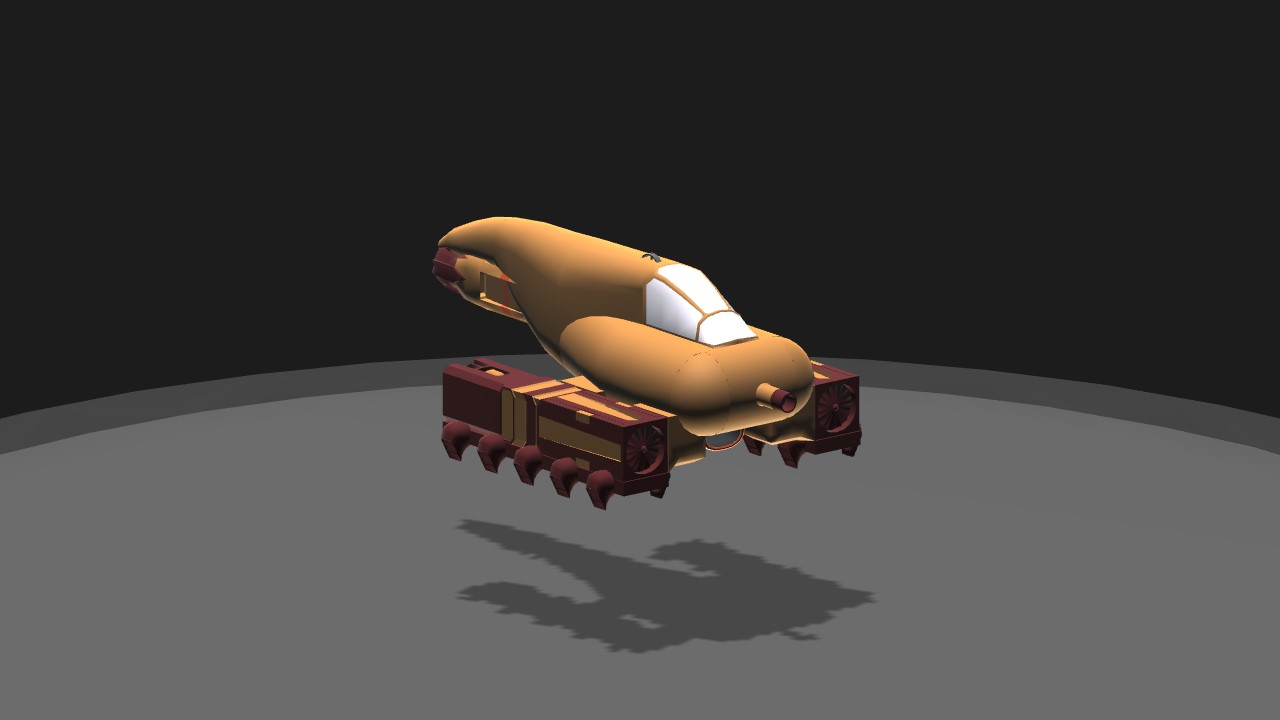
feel free to use the engines for your builds
STEERING
use trim to set altitude, use AG7 to change "modes" (mode 1 - Altitude is relative to the ground, max altitude is 100m; mode 2 - Altitude is relative to sea level, max is 4000m, 0 is on the bottom end of trim gauge)
you can use pitch and roll to sway (max velocity is ~90-100mph)
you can turn around with yaw
Increase throttle to use the engine at the back (max velocity is ~250mph)
armament
this hovercraft has a hyper high speed (both in terms of bullet velocity and rpm) cannon, capable of tucking uss beast under the water in a blink of an eye, or, with enough skill, even throwing it around like a plastic toy
ah, also, it has countermeasures
Specifications
Spotlights
- PlaneFlightX 4.6 years ago
- MoxWraith 4.6 years ago
- Spenzerointernational 4.6 years ago
General Characteristics
- Created On Windows
- Wingspan 9.5ft (2.9m)
- Length 16.9ft (5.2m)
- Height 6.0ft (1.8m)
- Empty Weight N/A
- Loaded Weight 7,319lbs (3,319kg)
Performance
- Power/Weight Ratio 4.145
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 2371
Parts
- Number of Parts 59
- Control Surfaces 0
- Performance Cost 207


looks good actually
Also the input is waaayyy overly complex
For the thrusters
Trim - (AltitudeAgl/10) - rate(AltitudeAgl)
For the yaw of the gyroscope
Yaw - YawRate/20
And boom, simple and stable
You do realise that putting the inputs on the actual VTOL thrusters, you can achieve an easy balance of roll and pitch while still controlling your AltitudeAgl without having to add in a gyroscope and relying on it to balance aircraft
Ahahah looks like something that would come from a Super Mario level