

ENGLISH
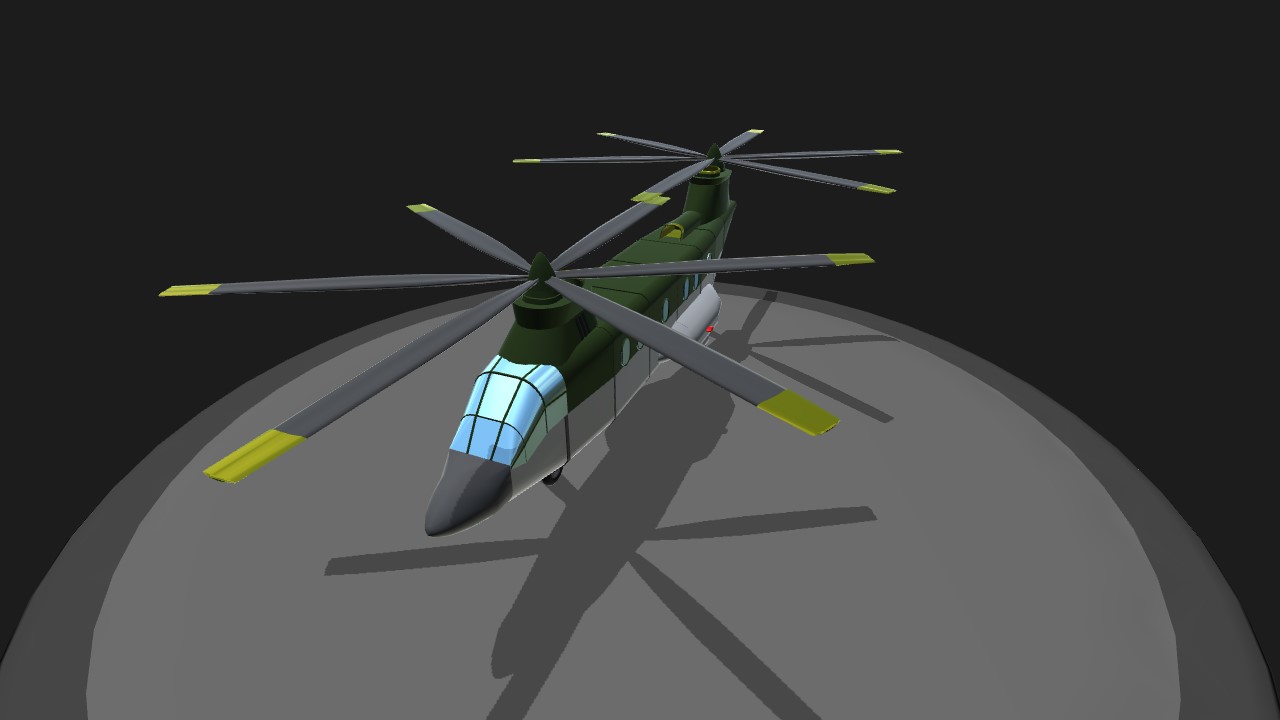
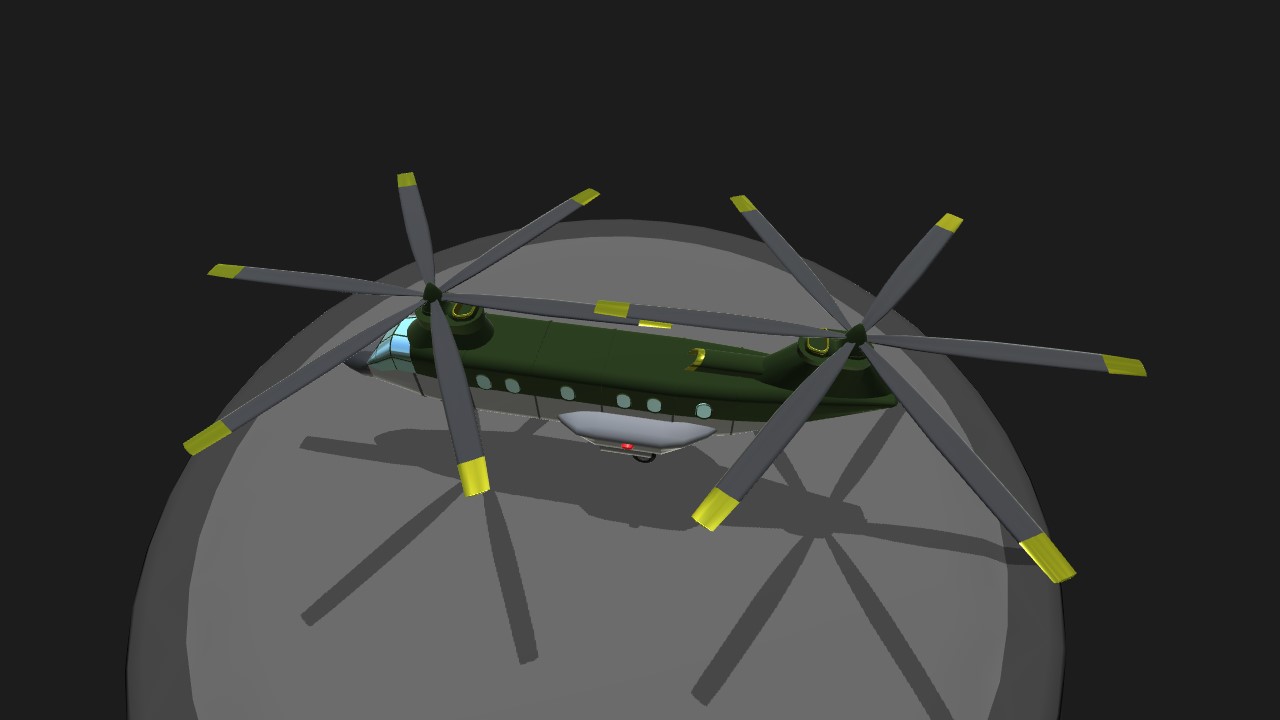
This double-rotor helicopter certainly takes a little inspiration from the Boeing CH-47 Chinook while not wanting to be absolutely close to a replica. Only the concept of a double-rotor helicopter comes from this gyrodine.
The control system I have chosen is an evolution of what I have studied for my previous helicopter, the SNAW HGA 01 (https://www.simpleplanes.com/a/Bca0Or/SNAW-HGA-01)
VTOL = Collective pitch of the rotors
Upward: positive pitch to fly, Downward: negative steps, useful to get off quickly from relatively high altitudes
TRIM = Angle of attack of the Rotors
Upward they lean forward and move forward, reverse the other way
THRUST = Engines rotation speed
These three commands require to be used with a certain balance. Maintaining a stable quota is obtained mainly by varying the collective pitch, bearing in mind that an excessive step with low engines rotation speed causes a fall in the speed of the blades, and therefore of the thrust. Giving angle to attack the rotors causes a component forward, and the loss of the same component vertically, if you do not compensate with the gas or with the collective pitch you will start to descend.
As the altitude or the situation changes, the equilibrium can be achieved with engine revolutions slightly different from test to test, considering a variation of plus or minus 2% as a normal adjustment.
The other three axles are absolutely standard.
For a perfect takeoff from wright airport:
THRUST 27% (26-30%) - Climb the TRIM slowly up to 50% - at first notch (The helicopter takes off gently and begins to rise vertically) - VTOL 50% up - at first notch (the rotors incline in ahead and the whole helicopter follows them.You lose vertical thrust and you acquire horizontal speed, until you stabilize.To stabilize the altitude may need adjustments between THRUST and VTOL, but this is normal in the absence of an autopilot).
The Helicopter can land and take of from water too.
NOT COMPATIBLE WITH THE AUTOPILOT
ITALIANO
Questo elicottero a doppio rotore prende sicuramente un po' di ispirazione dal Boeing CH-47 Chinook pur non volendo essere assolutamente nemmeno vicino ad una replica. Solo il concetto di elicottero a doppio rotore viene da questo gyrodine.
Il sistema di controllo che ho scelto è una evoluzione di quello che ho studiato per il mio precedente elicottero, lo SNAW HGA 01 (https://www.simpleplanes.com/a/Bca0Or/SNAW-HGA-01)
VTOL = Passo collettivo dei rotori
In alto passi positivi, in basso passi negativi, utili per scendere velocemente da quote relativamente alte
TRIM = Angolo di attacco dei Rotori
In alto si inclinano in avanti e ci si muove in avanti, indietro il contrario
THRUST = Regime di rotazione motori
Questi tre comandi richiedono di essere usati con un certo equilibrio. Mantenere una quota stabile si ottiene principalmente variando il passo collettivo, tenendo presente che un passo eccessivo rispetto al regime di rotazione causa una caduta di velocità delle pale, e quindi della spinta. Dare angolo di attacco ai rotori causa una componente in avanti, e la perdita della stessa componente in verticale, se non si compensa con il gas o con il passo collettivo si perde quota.
Al variare della quota o delle situazioni l'equilibrio si potrà raggiungere con regimi di rotazione del motore lievemente diversi da test a test, considerate una variazione in più o in meno del 2% come un normale aggiustamento.
Gli altri tre assi sono assolutamente standard.
Per un decollo perfetto da aereoporto wright:
THRUST 27% (26-30%) - Salire il TRIM lentamente fino a 50% su ovvero prima tacca (L'elicottero decolla gentilmente e comincia a prendere quota verticalmente) - VTOL 50% su, ovvero prima tacca (i rotori si inclinano in avanti e tutto l'elicottero li segue. Si perde spinta verticale e si acquista velocità orizzontale, fino a stabilizzarsi. Stabilizzare la quota potrebbe necessitare aggiustamenti tra THRUST e VTOL, ma questo è normale in mancanza di un autopilota).
L'elicottero è anfibio, e può atterrare e decollare anche dall'acqua.
NON COMPATIBILE CON L'AUTOPILOTA
Specifications
General Characteristics
- Predecessor Double WIP
- Created On Windows
- Wingspan 22.6ft (6.9m)
- Length 47.3ft (14.4m)
- Height 10.3ft (3.1m)
- Empty Weight 2,449lbs (1,110kg)
- Loaded Weight 4,717lbs (2,140kg)
Performance
- Horse Power/Weight Ratio 0.847
- Wing Loading 93.5lbs/ft2 (456.5kg/m2)
- Wing Area 50.5ft2 (4.7m2)
- Drag Points 3559
Parts
- Number of Parts 99
- Control Surfaces 0
- Performance Cost 443


@Dimkal Thanks. I see you are a chopper pilot, so your help it's precious.
@Baldovino Its my pleasure to do so but you are a platinum player and Im just a gold one. I feel Im kinda "inadequate" to judge you. Anyway, ur chopper looks nice but it has some design flaws. First the two tandem rotors are quite close to each other. See some Chinook photos and re-arrange them. Also, try to re-configure the flight controls, cause its hard to fly and steer once airborne. Its easier to control up-down with throttle and not VTOL and make turning easier. Another thing is the detailing. A player of ur caliber should add many details (lights, rotor hinges, camouflage, guns, sensors, etc). Hope I helped u. Have fun and thanks for asking my opinion.
@Dimkal I really like if you would try my helicopter and give me your judgment. Thanks.