In my previous post i mentioned, that i want to create detailed description of defining a relative coordinate system and working with it, but as i looked around shooting prediction i realized, that qualitative prediction system requires some features which are not presented in FT at the moment, so at this time i just posting this test car.
Meanings:
CCW rotation = positive
CW rotation = negative
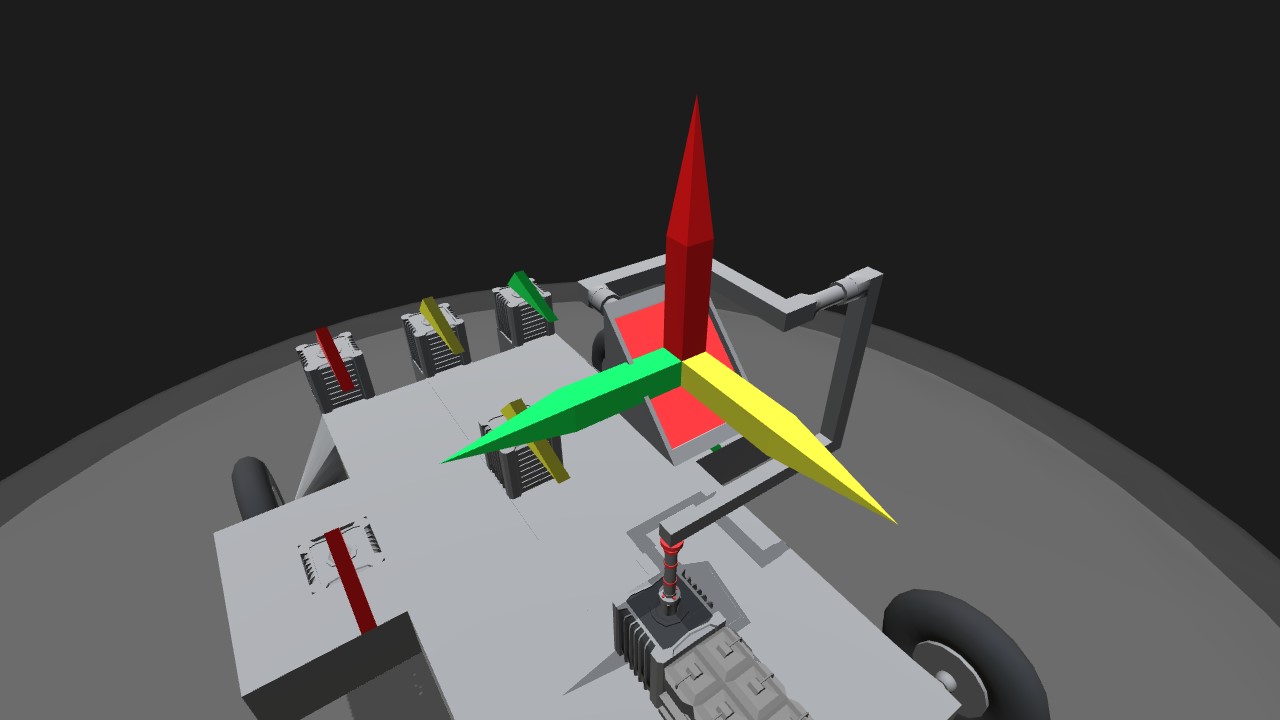
Green = relative X
Yellow = relative Y
Red = relative Z
front line of Rotators shows target's relative position
rear line of rotation shows projection of vector g on corresponding axes
To use relative CS, just write down your formulas with keywords, lets say, (relX) (relY) (relZ) (gfrcX) (gfrcY) (gfrcZ), and then, when your formulas is done, replace those short words with inputs of corresponding rotators from my vehicle.
Specifications
General Characteristics
- Created On Windows
- Wingspan 14.8ft (4.5m)
- Length 19.2ft (5.9m)
- Height 15.5ft (4.7m)
- Empty Weight 3,799lbs (1,723kg)
- Loaded Weight 4,422lbs (2,006kg)
Performance
- Wing Loading 547.8lbs/ft2 (2,674.8kg/m2)
- Wing Area 8.1ft2 (0.8m2)
- Drag Points 4719
Parts
- Number of Parts 104
- Control Surfaces 0
- Performance Cost 324