No Tags
Auto Credit Based on CaptainAkatuki's MARS-rover
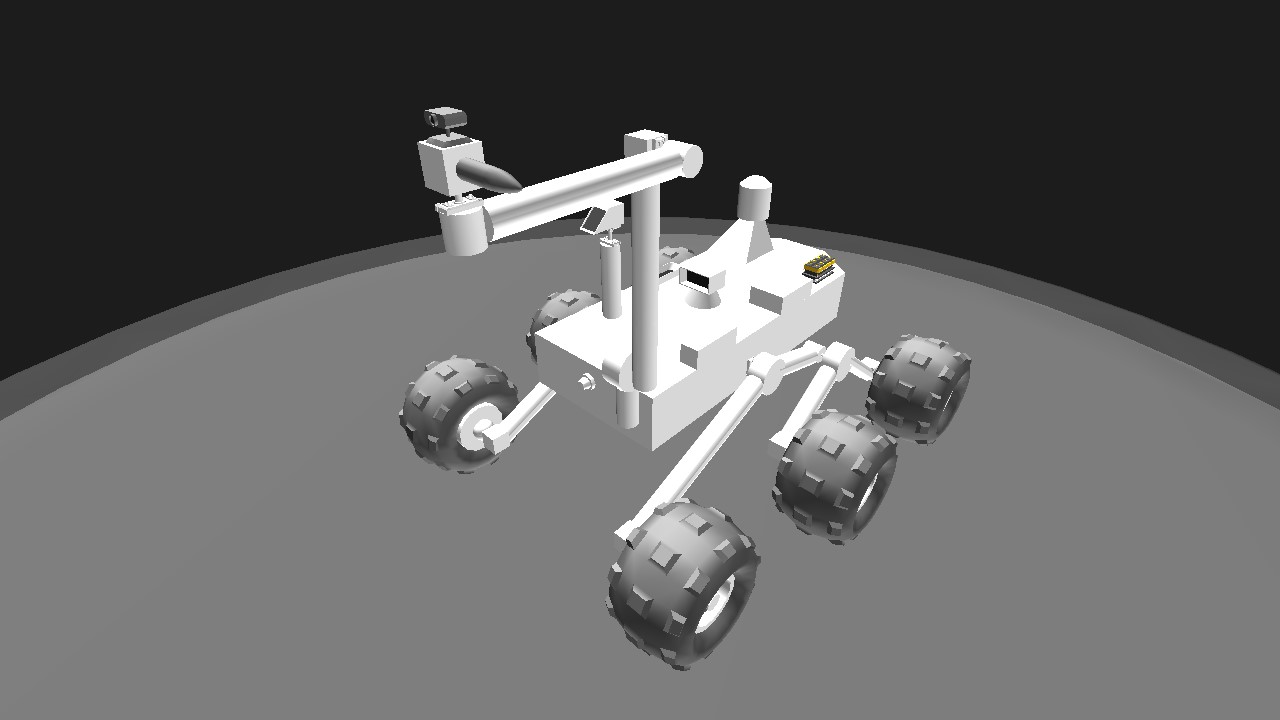
It is a model with improved operability than its predecessor. Cameras and mining drills are attached at the end of the arm. AG corresponding to the joint moving the arm is 1, 2, 3 or 4. It is possible to move up and down with VTOL and left and right with trim. Movement can be freely maneuvered back and forth, by roll and pitch. You can change the attitude of the main unit with AG6 and operate the main camera with AG7. The movement of the tire and the frame that supports it is so cool that you should try running through the rattle terrain.
Specifications
General Characteristics
- Predecessor MARS-rover
- Created On Android
- Wingspan 9.3ft (2.8m)
- Length 12.1ft (3.7m)
- Height 9.1ft (2.8m)
- Empty Weight 1,941lbs (880kg)
- Loaded Weight 2,382lbs (1,080kg)
Performance
- Wing Loading 439,839.3lbs/ft2 (2,147,483.6kg/m2)
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 2987
Parts
- Number of Parts 65
- Control Surfaces 0
- Performance Cost 414