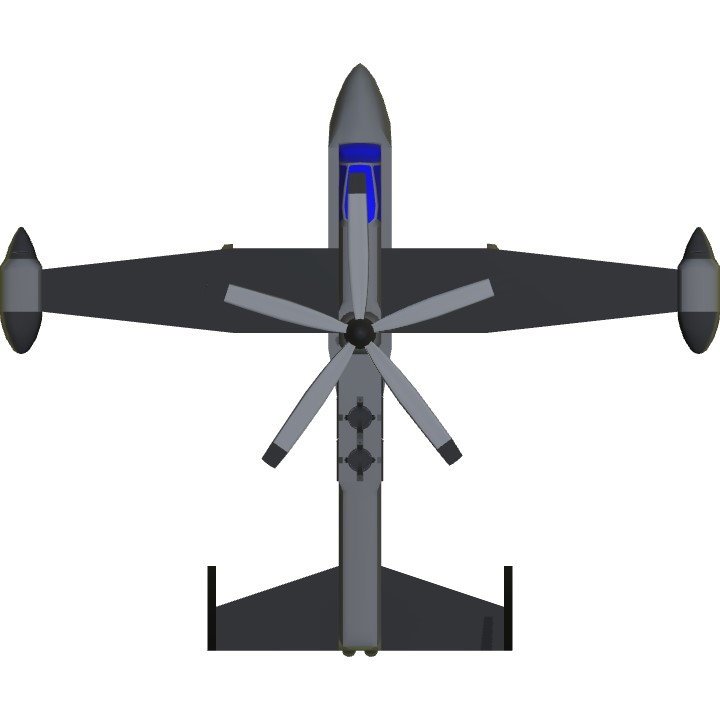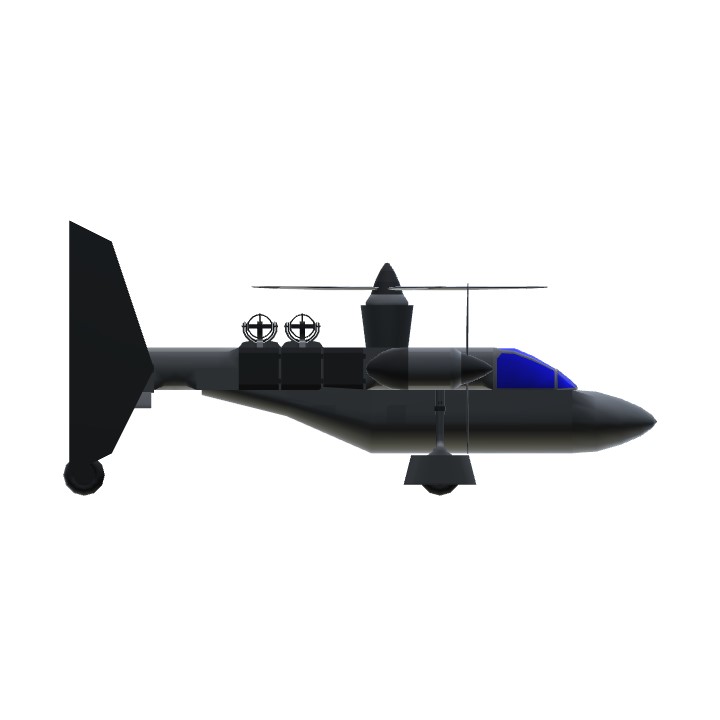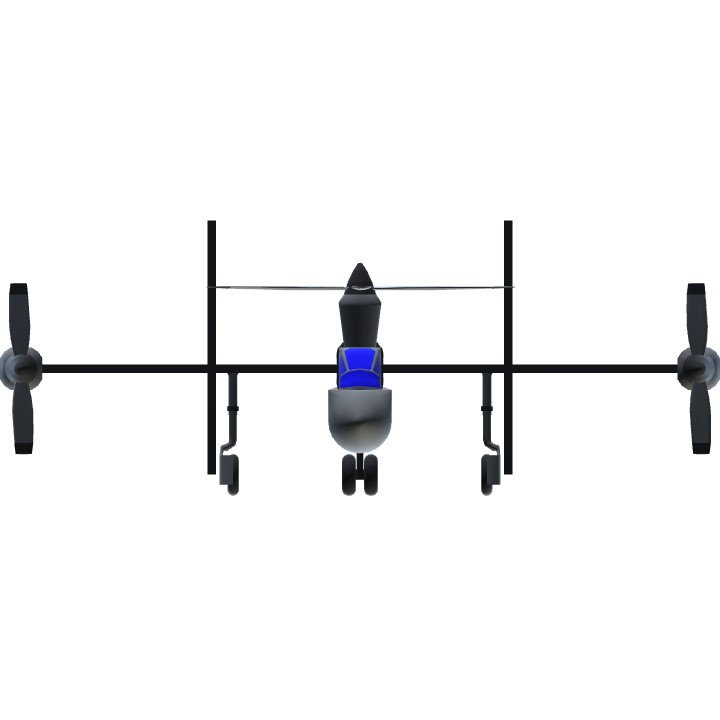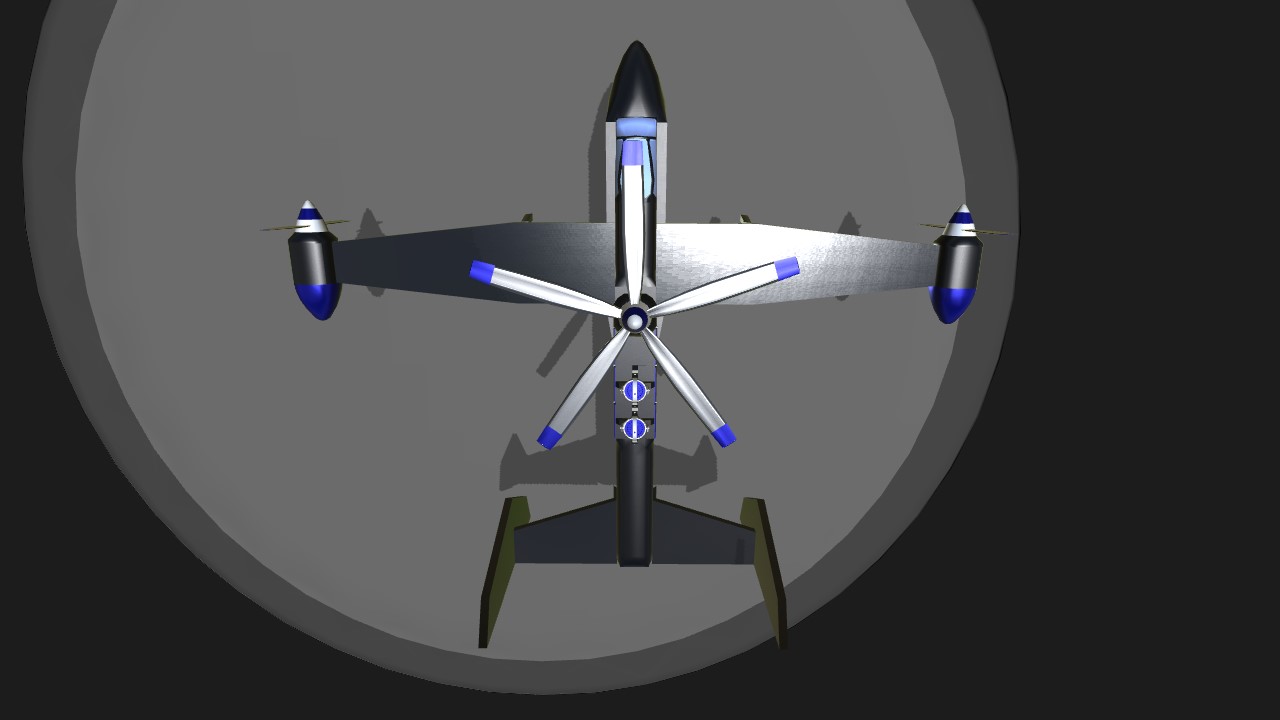
Gyrodynes combine the VTOL capabilities of helicopters with the front-facing rotors of regular ‘ol airplanes to allow for smooth cruising flight. The most well-known adaptation of this mechanism is used in autogyros (note: it’s not the exact same principle of operation, as an autogyro has an unpowered rotor on top that develops lift using magical forces of aerodynamics, but it’s close enough to make the comparison. Don’t @ me). I built this machine to explore the forces at play with a gyrodyne, and I’m really happy with the result.
I tried to make the controls as fluid as possible. However, SimplePlanes doesn’t easily lend itself to this kind of machine. That’s not a fault of SP, but rather a statement on the absolute madness of this experimental aircraft.
I was able to get around placing different phases of operation on different activation groups, I hope you guys can appreciate that.
UNCONVENTIONAL CONTROLS:
(It’s a little weird at first, but I’ll try to go over my justification for each unique control)
- Yaw and roll are both mapped to left and right positions on the right joystick. For ease-of-control, aircraft returns to horizontal position after you release the right joystick.
- Upper rotor thrust is mapped to up and down positions of the left joystick. Forward rotor thrust is mapped to upper portion of trim slider. This allows for an easy switch between VTOL mode and cruising flight.
- Air brakes are mapped to lower portion of trim slider. This allows you to lock the brakes, permanently slowing forward motion to easily land the aircraft.
- Pitch is mapped to VTOL slider. This allows you to manually set the cruising altitude.
VTOL TAKE-OFF:
1. Set throttle to 100%.
2. When aircraft lifts, set trim slider to 100% (up). This will activate the cruising flight, and propel the aircraft forward.
3. Set VTOL to around 20-25%. This will set the pitch parallel to slightly above the horizon.
4. Deactivate gears.
5. Bring thrust down to 0% when aircraft reaches about 100mph, keeping trim at 100%.
6. Use VTOL to control pitch.
7. Roll and yaw are controlled with left and right motions of the right joystick.
[To accomplish a cruising take-off, skip steps 1 & 2, and set trim slider to 100% (up).]
VTOL LANDING:
1. Approach landing zone, at an altitude of 1000-1500ft above the landing surface.
2. Apply air brakes by pulling down on Trim.
3. Pitch front of aircraft upwards, and bring thrust to 85-90% until you’re at 250ft above the ground.
4. This step is optional, but I’ve found it helpful. When you’re at 100ft, you’ll want to pump the thrust up to 100% for a couple seconds to ensure a smooth landing.
5. The aircraft hovers at 94% thrust. This means you want the thrust to be around 92% to slowly float down to the surface.
6. At this time, the aircraft might start to rotate to either side. You can control the rotation with (I cannot stress this enough) VERY light movements of the yaw and roll.
7. When you’re visually less than 20ft above the surface, cut the thrust down to 0%. This will allow you to land without bouncing.
8. Pull down on thrust to apply brakes on wheels.
9. Practice. Landing is much more difficult than taking off. :)
Specifications
General Characteristics
- Created On iOS
- Wingspan 27.9ft (8.5m)
- Length 23.0ft (7.0m)
- Height 10.5ft (3.2m)
- Empty Weight 4,479lbs (2,031kg)
- Loaded Weight 5,076lbs (2,302kg)
Performance
- Horse Power/Weight Ratio 0.453
- Wing Loading 38.9lbs/ft2 (189.9kg/m2)
- Wing Area 130.5ft2 (12.1m2)
- Drag Points 2118
Parts
- Number of Parts 49
- Control Surfaces 0
- Performance Cost 278