

At long last, it's here!
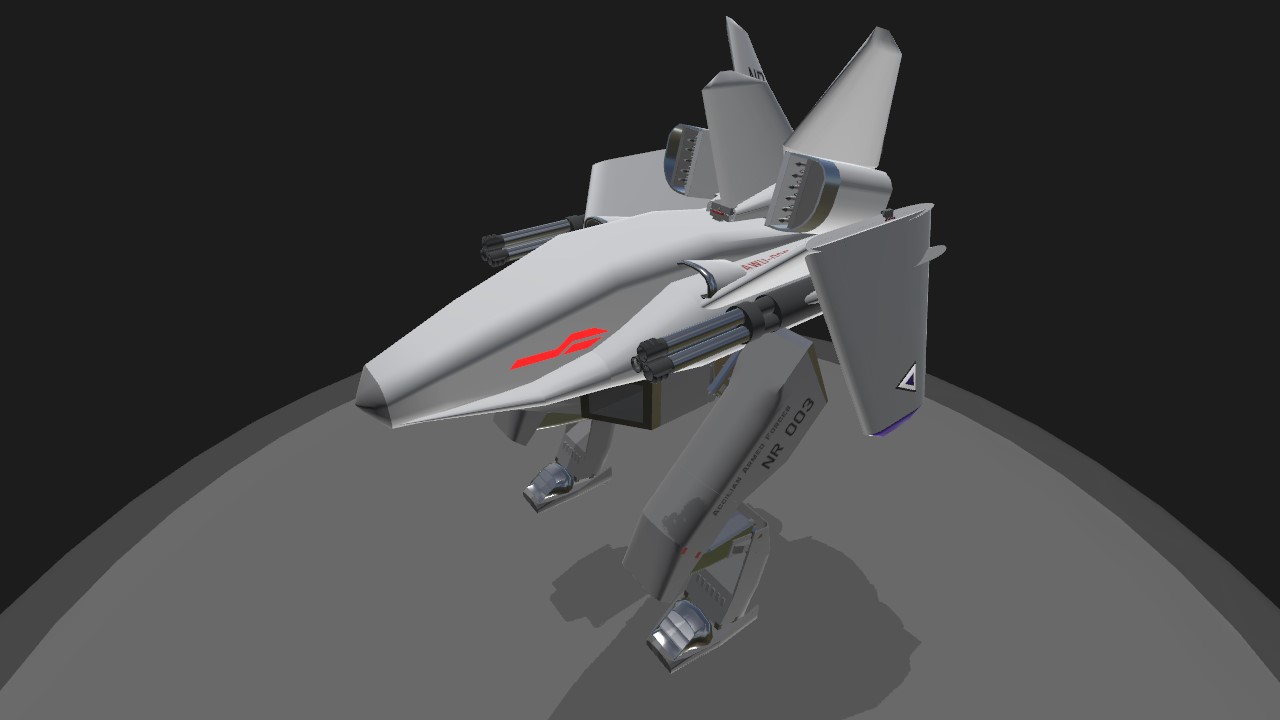
The Airborne Walker Unit (AWU) project was founded by the Fenris Defense Aeronautics company in order to explore the possibilities of incorporating a CAS aircraft, Recon aircraft, Infantry Support Vehicle, and attack VTOL in one airframe. The result is a highly versatile unit capable of filling a variety of roles in the military. This AWU is painted in AAF markings, but is not related to the Accilian Armed Forces.

The AWU is armed with two weapons, a pair of high-caliber gatling guns, and a pair of dual-purpose missile launchers for targets that the guns cannot reach.
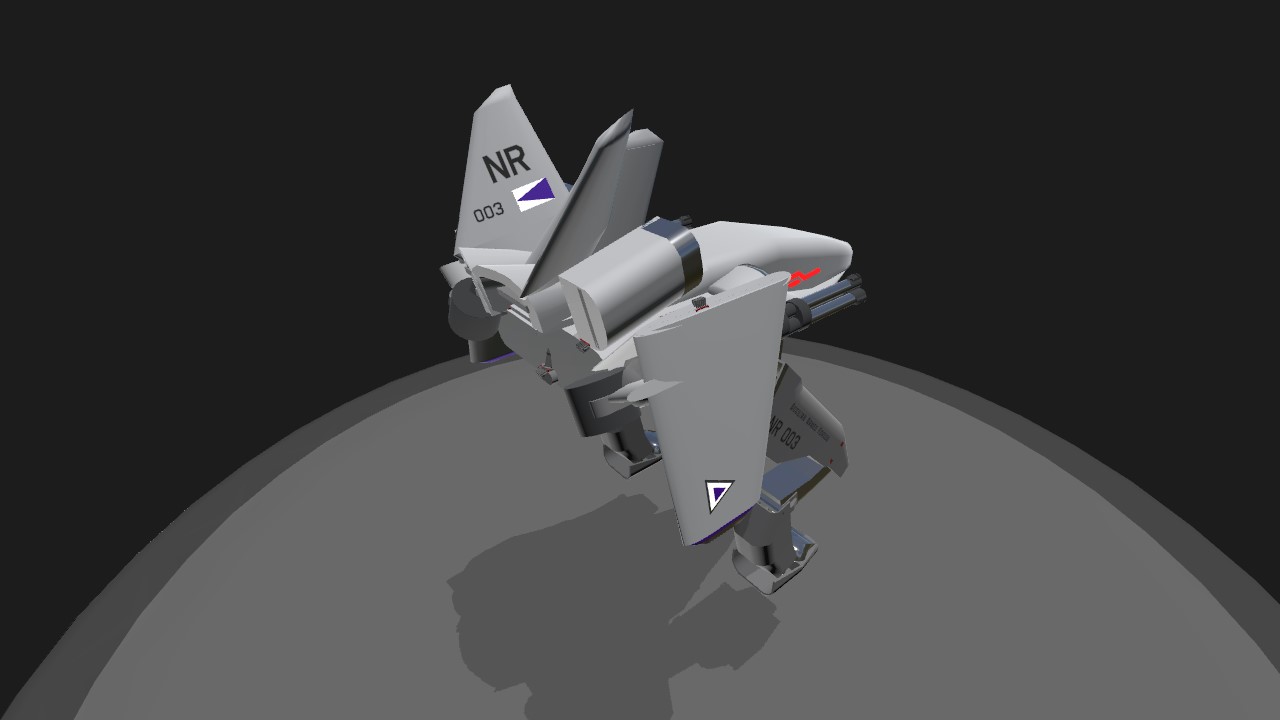
In mech mode, the unit is capable of a top speed of 10 miles per hour, with the ability to climb up 30+ degree slopes without issue. Throttle controls forward movement, with Yaw controlling the steering and roll rotates the main section by a small amount. Pressing Activate2 allows to change into jet mode, or having the landing gear retracted while doing the same shifts straight to VTOL mode.

In VTOL mode, the AWU will be able to hover and either takeoff, land, or cover an area for surveillance or air support. A gyroscope and control software compensate for most unwanted velocity, but strange occurrences sometimes surface which would require manually cycling the engine output +-20% or the pitch axis for the AWU to settle again. Optimal hover throttle is just under 30%, and throttle is not controlled by the flight computer.

In Jet mode, the AWU spreads its wings and flies like a conventional aircraft, albeit a fairly slow one. The missile pods retract to form part of the fuselage, so they become inoperable in this mode and leave the gatling cannons as the sole armament. The flight stability is controlled by gyroscope, resulting in stable and predictable flight for even the most novice pilots.

The AWU model 002 is available in either unmanned or manned versions, but this particular model is an unmanned model. The role of the windshield is replaced by the two glowing sensor clusters in the forward fuselage, which give good situational awareness to the AI or remote pilot, with additional compatability with most datalink frequencies.
With luck in the market, Fenris Defense Aeronautics intends on expanding its AWU program to fill more battlefield roles with other models.
*Thumbnail pose is exaggerated for dramatic effect
Specifications
Spotlights
- KudaOni 11 months ago
- ShinyGemsBro 11 months ago
- YarisSedan 11 months ago
- Rob119 11 months ago
General Characteristics
- Created On Windows
- Wingspan 12.2ft (3.7m)
- Length 16.5ft (5.0m)
- Height 17.2ft (5.3m)
- Empty Weight N/A
- Loaded Weight 8,316lbs (3,772kg)
Performance
- Power/Weight Ratio 3.242
- Wing Loading 70.2lbs/ft2 (343.0kg/m2)
- Wing Area 118.4ft2 (11.0m2)
- Drag Points 6697
Parts
- Number of Parts 240
- Control Surfaces 2
- Performance Cost 1,205



Ive also noted a flaw in the steering, you need to angle the main fuselage in the direction you want to turn in while in mech mode. Just be advised
Tag list part 3:
@CaptainBrayden
@dabestock
@ShinyGemsBro
Tag list part 2: (Cause Im a goober)
@BYardley
@Majakalona
@V
Tag List (Thanks a ton, guys!):
@TheMouse
@FOXHOUND26
@Speedhunter
As I said in a previous forum post, without your guys' interest this probably would have taken a lot longer lmao, so thanks for giving me the motivation I needed to finish this build in... (checks notes) Four days?
I think that's a record for something Ive put this much soul into.
Also thanks for putting up with my filler uploads in the meantime, I was just trying to get all my old builds on the site before I forgot about them.
Again, thanks a ton!
@c144538707 I dont know how I overlooked that
tag mech
@KudaOni I mean that is kinda what it is
OOOOHHHH reminds me of the Gerwalk Mode of the Variable Fighters in the Macross seriee! Awesome!
@Griffon1 Yay thank you
@Robomo119E of course I don't mind, Id love to see what you can do with it
@Griffon1 do you mind if I use your tec?
@Griffon1 oh ok
@Robomo119E I would like to, but it's an extremely long and complicated thing to explain exactly.
Long story short, the core of the walking function is the sine and cosine function, and almost all the hinges and rotors are constantly checking for either Activate2, Landing gear, or both. Effectively, I'm writing two to three functions for each joint
VTOL mode uses a lot of convoluted ways for finding the forward and sideways velocity, and compensates based on that, when no input is supplied.
This is also building on my almost six years of playing this, so there was just a lot of things I picked up to make this thing tick
Hey could you teach me how to make something like this, please?
He flip too!
How incredible!!!!!, great job
@Kudaoni check this out
Let’s go it’s out
Btw, you can only tag 3 people per comment. So that means that everyone after speedhunter did not get a notification. You will want to retag them in a new comment. (3 per comment)
Nice work on this!
Also,
MOUSE WAS HERE (almost) FIRST!
(Nice job @MAPA for being slightly ahead of me)
I also lost the .pdn file I used to make the thumbnail so I'm probably gonna have to design one from scratch for my next upload, but for now Im just gonna enjoy my weekend