IMPROVED Quad copter concept V.7 (improved stability) Read description for controls
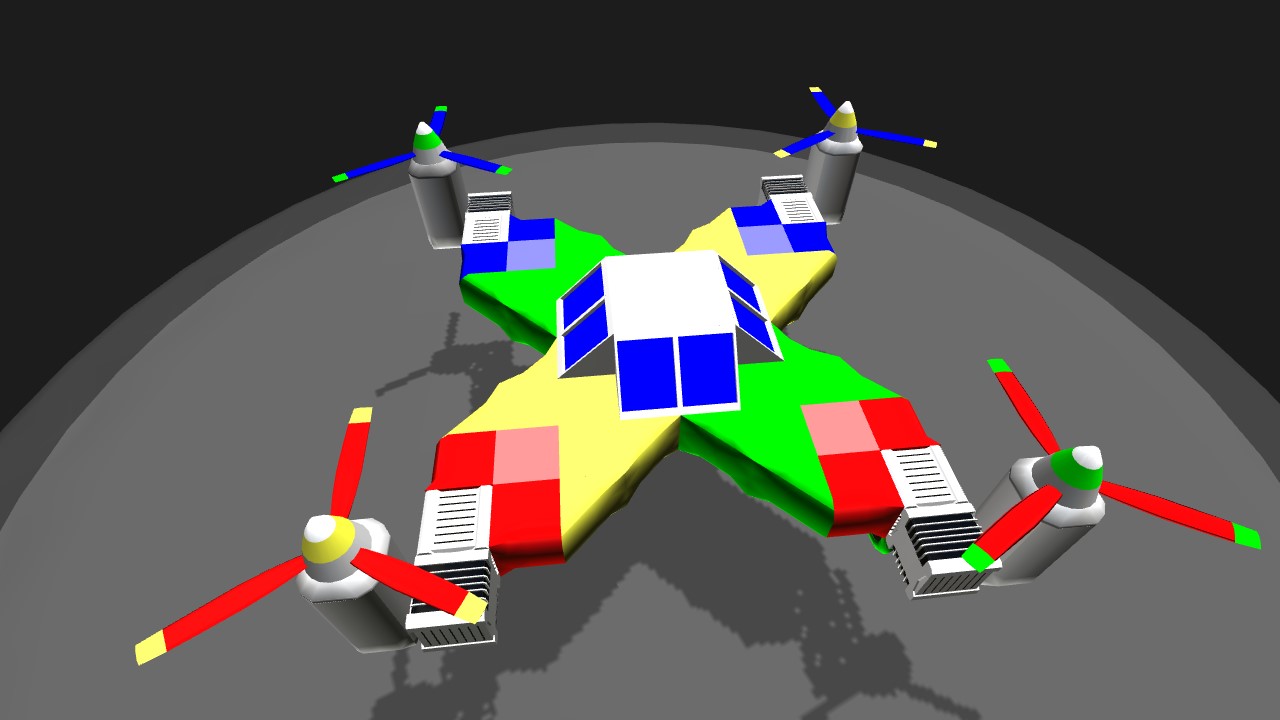
This is a slightly improved version of my original quad copter.
(Please comment any thoughts or improvements you can think of (: thanks)
There are a few main changes: For some reason 2 of the rotors were on yaw controlled pitch, centre of lift and gravity moved down, angle of movement adjusted.
To fly it fowards, push the right stick up slowly (dont hold the right stick, it will tip) while pulling down on the vtol to keep it stable.
Left and right is the same, but you pull the right stick right and the left to the left. Also, think of this: your rotors that are on the side you are wanting to go are your 'pulling' rotors and the rotors opposite are your 'counteraction' rotors which are doing almost the opposite of your pulling rotors.
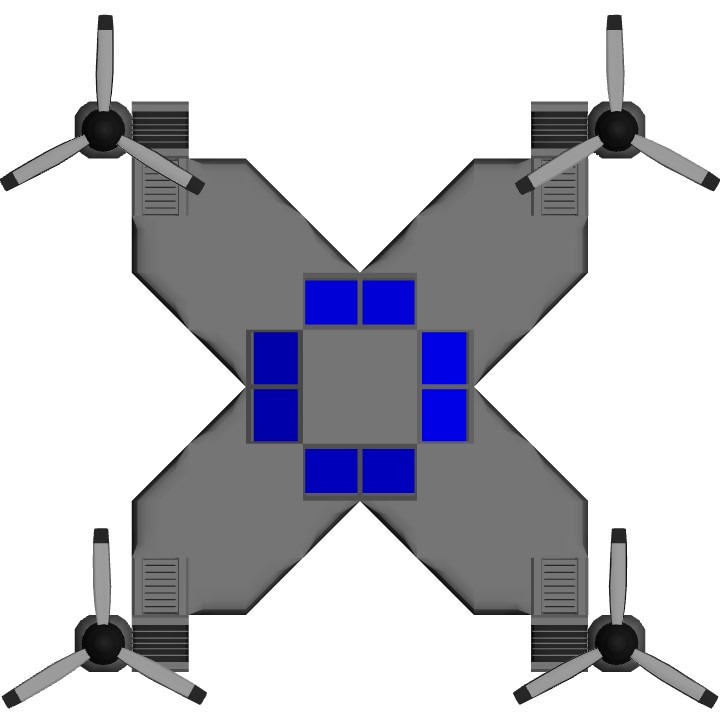
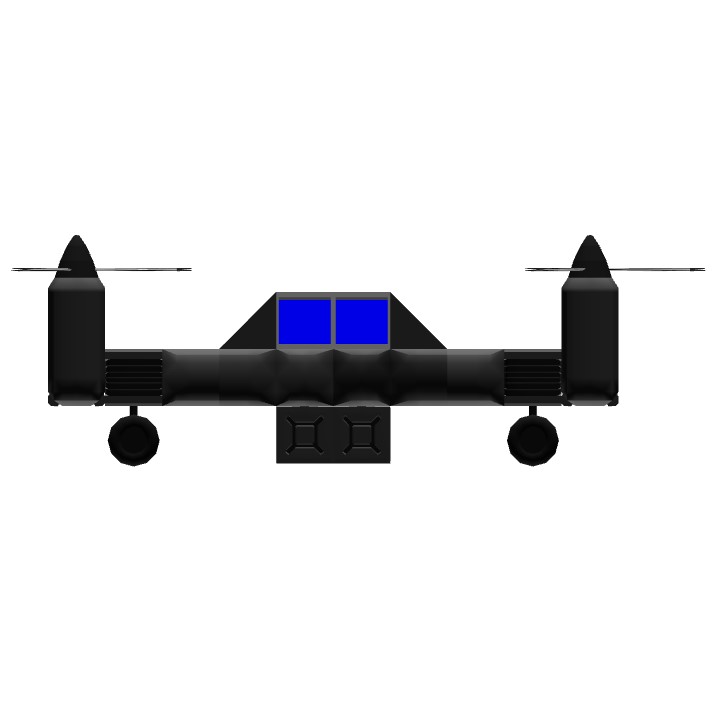
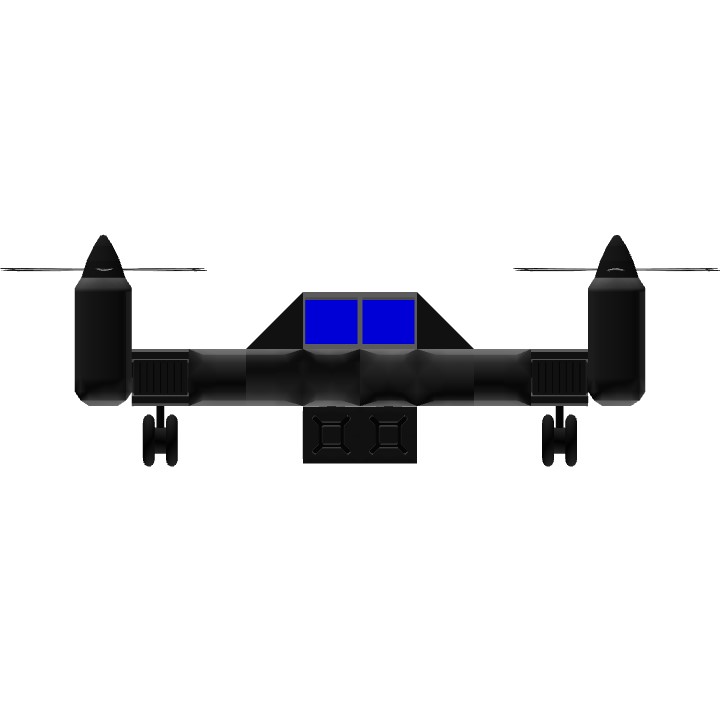
The colours are for orientation: blue = front, red = back and yellow and green are just mor help.
(Sorry for any spelling mistakes, the simple planes app doesn't let auto correct work)
Specifications
General Characteristics
- Created On iOS
- Wingspan 20.7ft (6.3m)
- Length 19.9ft (6.1m)
- Height 6.5ft (2.0m)
- Empty Weight 5,908lbs (2,680kg)
- Loaded Weight 6,440lbs (2,921kg)
Performance
- Horse Power/Weight Ratio 0.31
- Wing Loading 439,839.3lbs/ft2 (2,147,483.6kg/m2)
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 6266
Parts
- Number of Parts 92
- Control Surfaces 0
- Performance Cost 390