
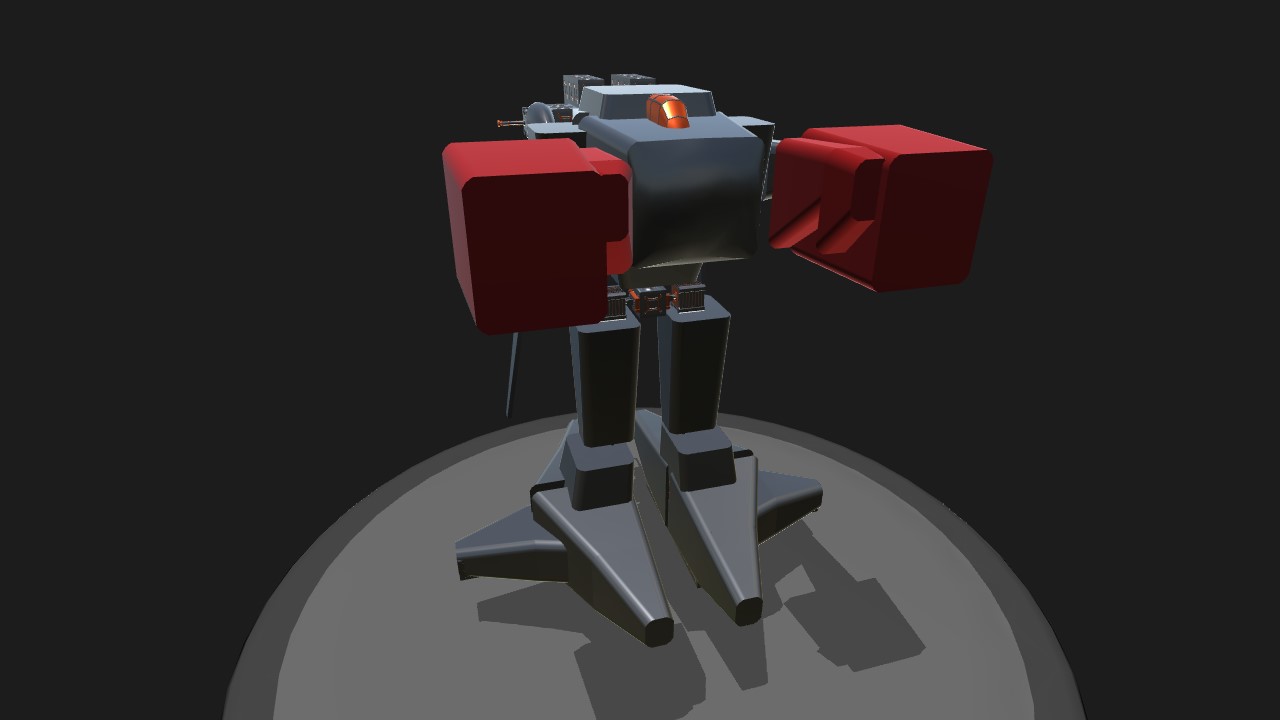
My first and most probably only attempt at a walker mech. I decided to try a combination of rotators that somewhat emulates actual legwork instead of the usual modded endless rotator system I've seen around. It's indeed slow but not only it works, it's surprisingly able to stay in standing position, and if it falls it can get up easily by punching the floor.
-Group 1 activates the legs. Yaw right to step with the right leg and move forward the left, yaw left for the opposite. Try to start each step when the previous foot touches the ground.
-Group 2 activates the arms. Roll right to use a right straight punch and roll left for a straight left.
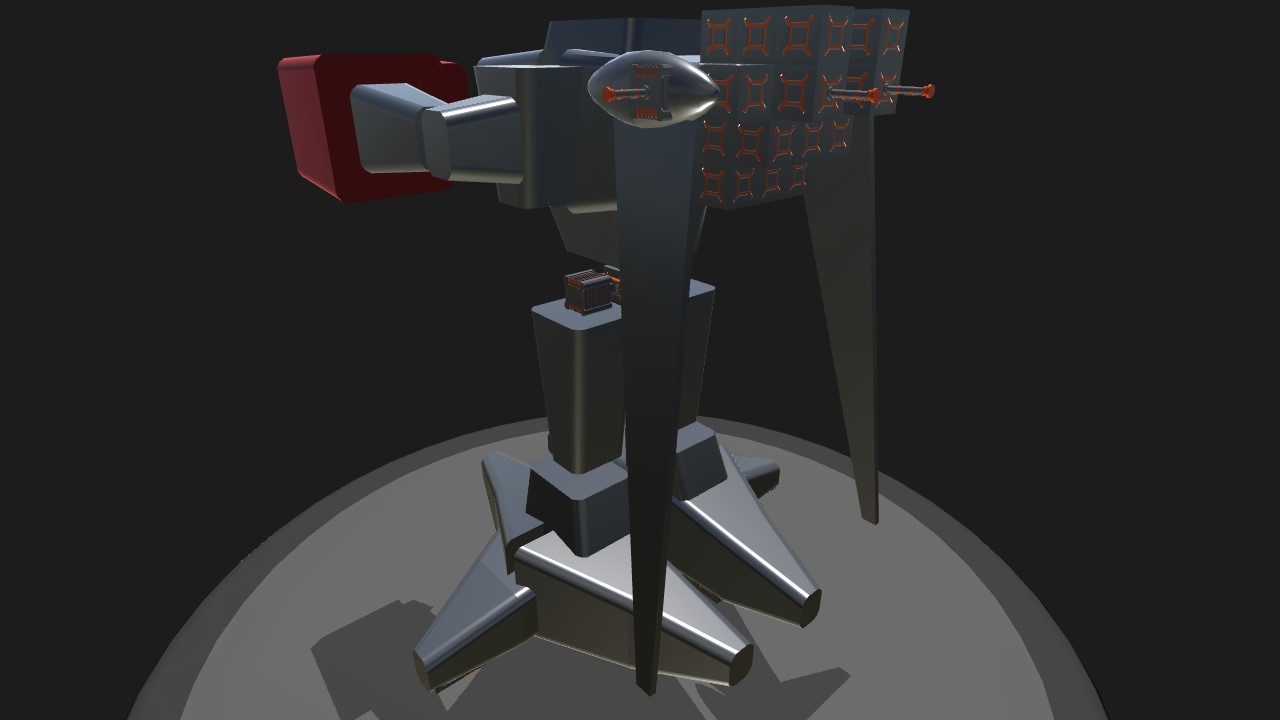
-Group 3 activates auxiliary stuff on the back to help when you fall on your back and sides. Pitch forward to use it.
Specifications
Spotlights
- Patrick20206 8.6 years ago
General Characteristics
- Created On Windows
- Wingspan 26.5ft (8.1m)
- Length 27.0ft (8.2m)
- Height 30.0ft (9.1m)
- Empty Weight 51,199lbs (23,223kg)
- Loaded Weight 105,273lbs (47,751kg)
Performance
- Power/Weight Ratio 1.408
- Wing Loading 991.4lbs/ft2 (4,840.6kg/m2)
- Wing Area 106.2ft2 (9.9m2)
- Drag Points 27677
Parts
- Number of Parts 122
- Control Surfaces 0
- Performance Cost 514
@MrMecha Thanks!