No Tags
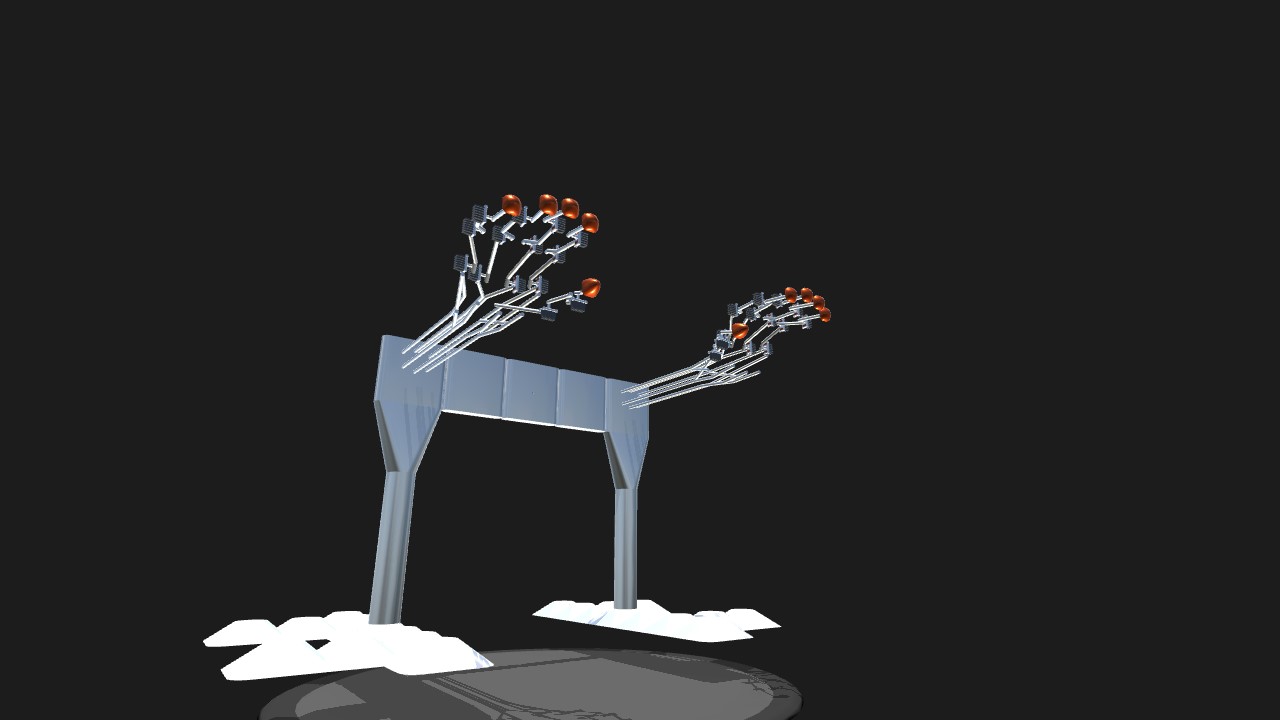
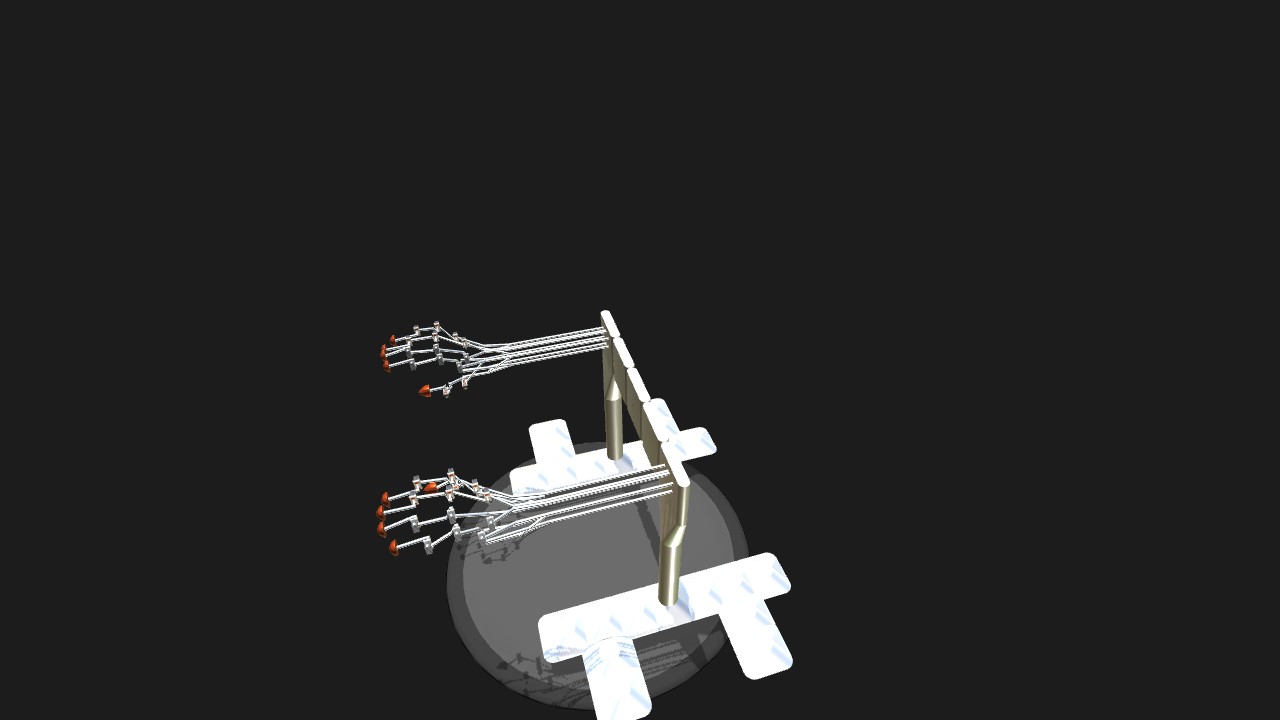
These are just some robotic hands I've made. Feel free to improve upon them. I've tried to make them as natural moving as possible. They are just hands and forearms mounted on a base for testing them out. Right now they hands can open and close. appendages move independently and can possibly be used for grasping objects. I'm currently working on legs with knee, ankle and toe movement.
Specifications
General Characteristics
- Created On Windows
- Wingspan 64.0ft (19.5m)
- Length 58.0ft (17.7m)
- Height 38.3ft (11.7m)
- Empty Weight 45,927lbs (20,832kg)
- Loaded Weight 45,927lbs (20,832kg)
Performance
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 56574
Parts
- Number of Parts 234
- Control Surfaces 0
- Performance Cost 883