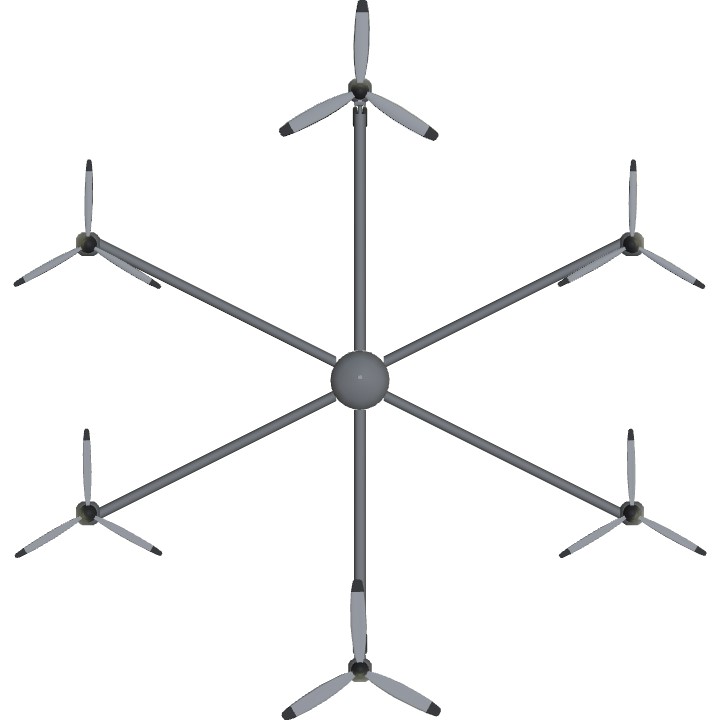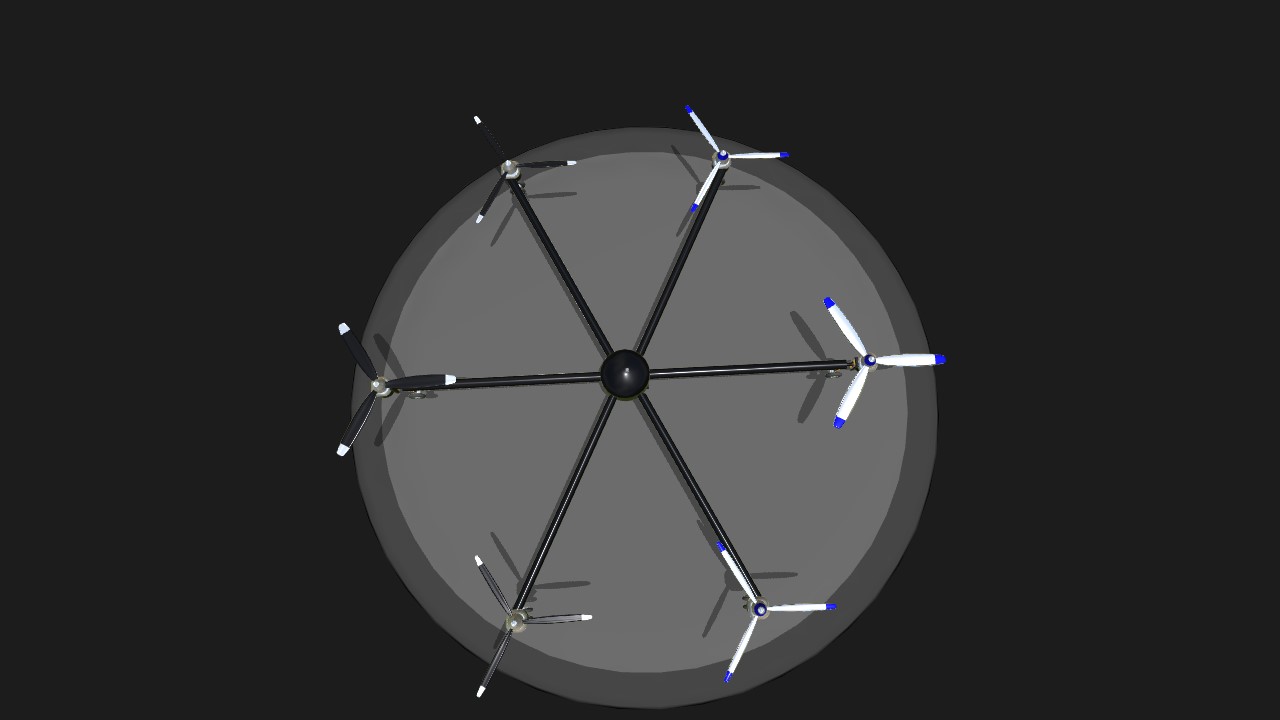
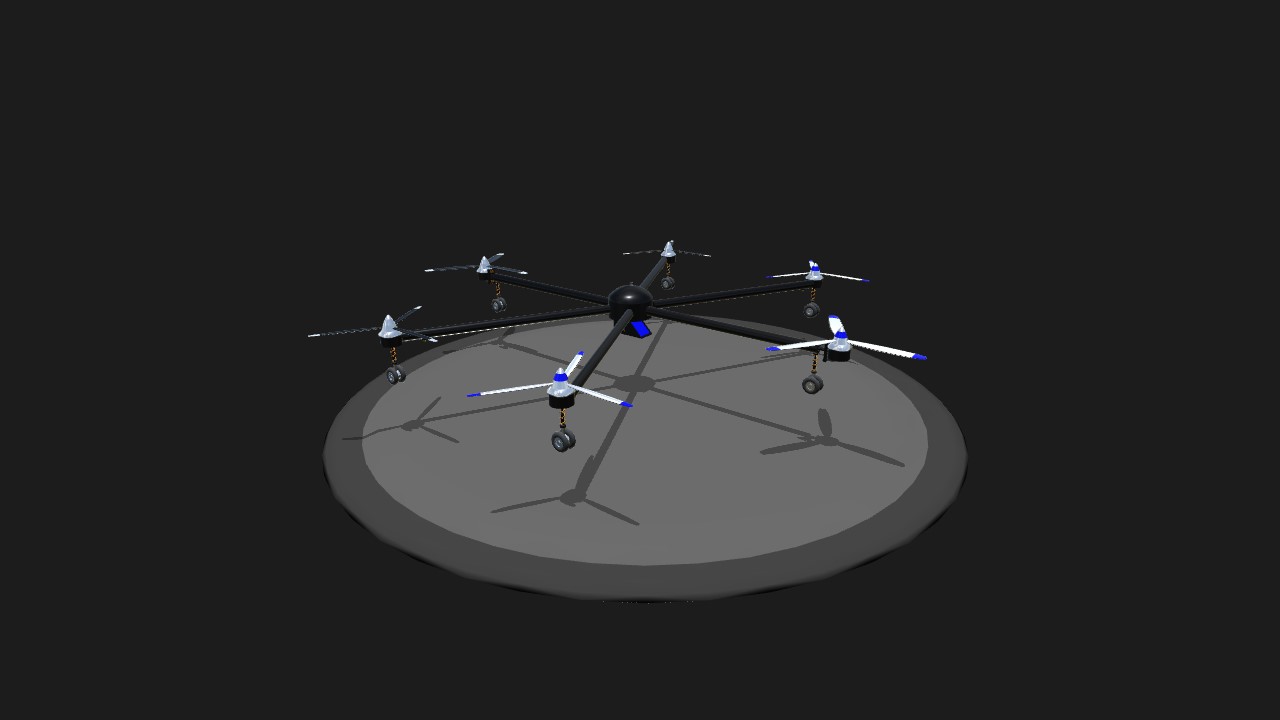

My first shot at a "drone" type craft. Uses HellFireKoder's gyroscopic cockpit mod. You "can" fly it without but it is much more difficult. Here's how to fly it: If anyone has flown an RC drone without any stability control, it will probably feel pretty natural. Throttle up to about %25 to lift off slowly and maintain easy control with pitch, roll and yaw. You can easily hover and cruise at around 60 mph. Increase throttle and you can also increase pitch angle for more speed. %35 throttle and about 30 degrees of pitch allows for good speed and altitude control. You can successfuly fly at around %70-%75 throttle and 60+ degrees of pitch, but it is not easy to control and any more than that and you risk overspeeding the engines. You can do short bursts of %100 throttle for very quick altitude gains as long as you are not pitched too far in either direction. Landing is a little tricky, I find it easy to make an approach around 30 degrees at around %25 throttle, Around 1000 feet, level out and throttle up a tad to slow descent, then lower throttle while keeping the craft level. I'm not happy with the yaw control, but since torsional rotation is not yet programmed in, I had to make due but under extreme pitch rate, the yaw controls can cause some instability. I hope everyone has fun with it.
Specifications
General Characteristics
- Created On Windows
- Wingspan 48.1ft (14.6m)
- Length 49.9ft (15.2m)
- Height 6.3ft (1.9m)
- Empty Weight 5,288lbs (2,398kg)
- Loaded Weight 6,190lbs (2,807kg)
Performance
- Horse Power/Weight Ratio 0.84
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 5875
Parts
- Number of Parts 47
- Control Surfaces 0
- Performance Cost 440
Required Mods
-
Gyro Cockpit
by HellFireKoder
Version 1.1 (2/6/2016 12:25:31 AM)
View Mod Page
View Mod on Steam Workshop