


This is my entry to the drone challenge. This racing drone is the setup I use in Liftoff. Its human name is the demonstration of my love to this setup. I did not bother to build my Futaba T8FG Super and Fatshark FPV goggle since there is not many submission yet (And I have other stuffs to build). To obtain similar flight characteristic as in Liftoff, I used XML modding to reduce the weight and drag. It turned out to be extremely nimble and fast. Therefore, I decided to give it a spin on some car races to test its ability to fly low and I managed to complete Gold Prix in 26s.
Important note: It is highly recommended to fly this thing with an RC transmitter with throttle zero set to be the lowest throttle value.
Controls:
AG1 Level mode,
AG2 3D mode,
AG3 Turn off camera HUD
Trim to adjust camera angle
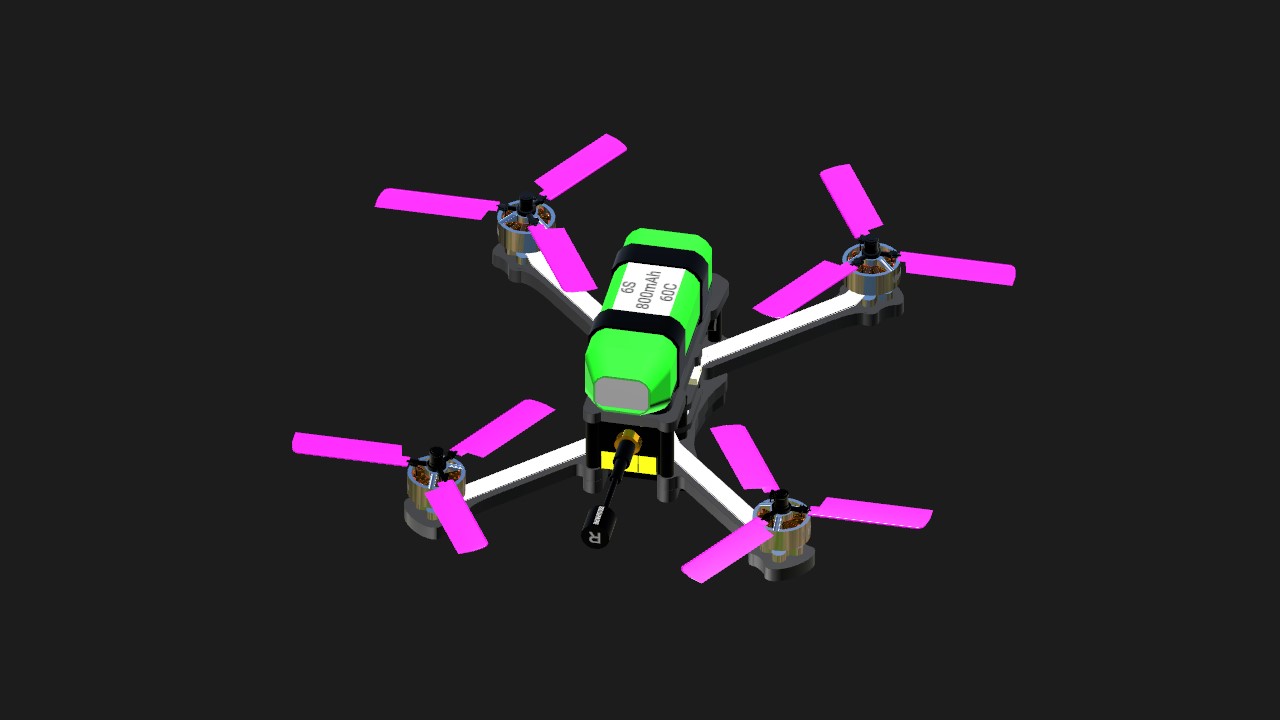
To recreate the setup in Liftoff, here is the part list
Armattan Mongoose Chassis
Rotor Riot Hypetrain Vortex 2207 Motor
Any 5050 Prop of your liking (I prefer Lumenier props)
Soupape micro antenna (IRL: Foxeer Lolipop)
Red dot micro camera (The only camera that fit. IRL: Foxeer Razor Mini)
Airadarko 6s 800mah 60C battery (The lightest battery of any voltage class will do)
Default racing tuning with AI PID
Hope you enjoy!
Specifications
General Characteristics
- Predecessor FPV Drone Challenge
- Successors 8 airplane(s) +28 bonus
- Created On Windows
- Wingspan 18.3ft (5.6m)
- Length 20.2ft (6.2m)
- Height 5.7ft (1.7m)
- Empty Weight 790lbs (358kg)
- Loaded Weight 794lbs (360kg)
Performance
- Power/Weight Ratio 113.147
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 455
Parts
- Number of Parts 379
- Control Surfaces 0
- Performance Cost 1,248


@Jemandx8 i have one. Check my Mini 2!!!
This thing if FUN! I love it.
probably the only good flying fpv drone on the website tbh
Can anyone change roll and yaw around
Perfect but i misss a auto hovering mode
@Ownedpilot 👍
@o2o I used the variable system so that is where you should be looking.
@Ownedpilot Ok. Also, i cant find the actual part to change the rates.
@o2o For each Pitch, Roll, and Yaw PID, there is a multiplier before the Pitch, Roll, and Yaw control input. There are separate PIDs for leveling mode and acro mode. The first PID is for the leveling mode and the second PID is for the acro mode. Therefore, you need to change the multiplier of the second PID. The problem is, the current setting is the fastest rate I can achieve without severe snap back. This drone seems to have a low limit in terms of its rates. You may need to tune down I term in PID to achieve faster rates.
Very good
Hey, how do you change the rates? it flies well but if you want me to make a freestyle video i have to be able to change the rates.
Also, looks amazing!
@Ownedpilot maybe! Just depends if i have time.
@o2o Can you make a freestyle video with this drone? I am more of a racing guy so my freestyle capability may be limited.
Ah, I remember this one.
Nice job.