
Controls
Landing gear is used to transition from landing mode to normal flight mode.
20% Throttle to hover in landing mode. AG8 to turn off the engine.
This plane has auto-leveling in the normal flight mode. However, pulling up by more than 85% will disable the auto-leveling, which should assist with taking loops.
Notes
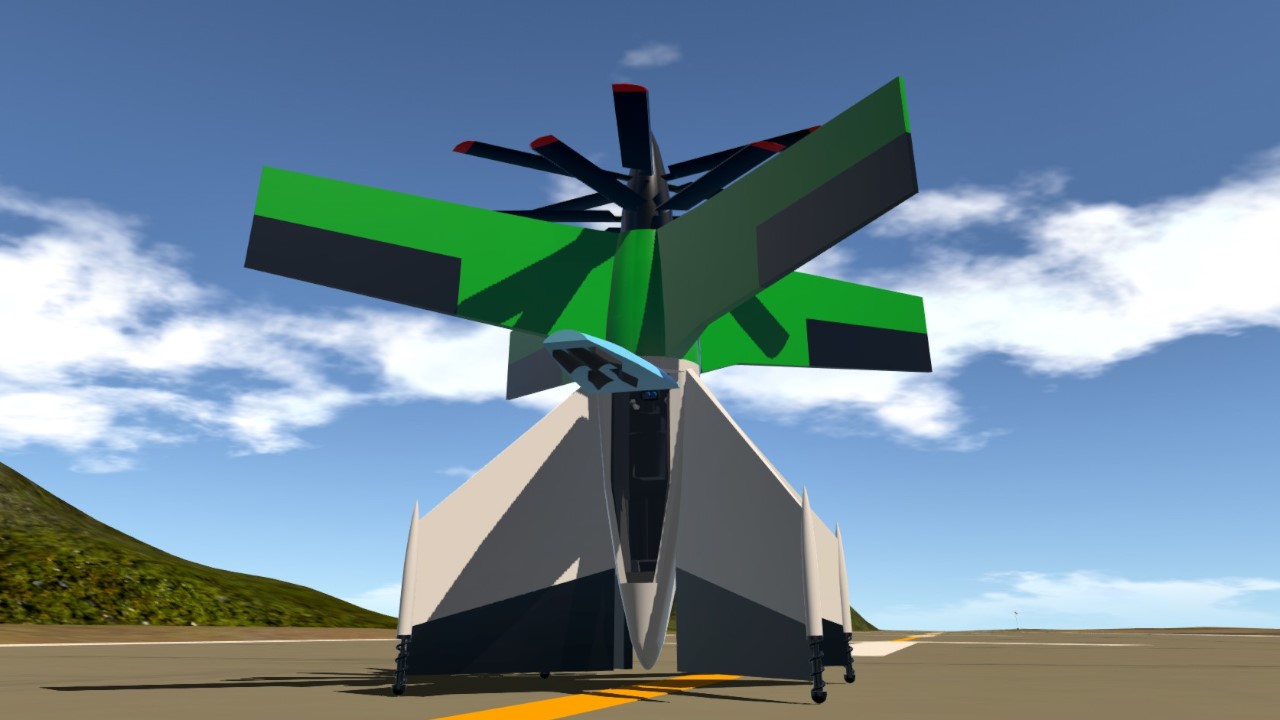
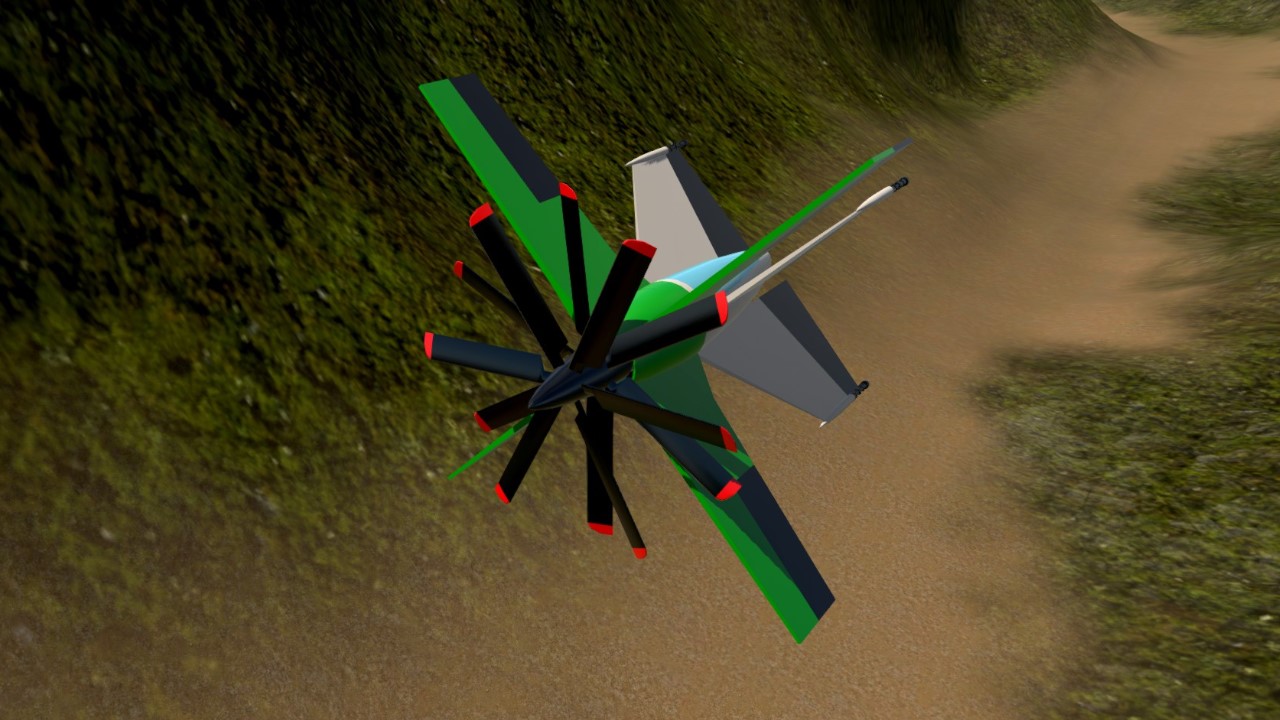
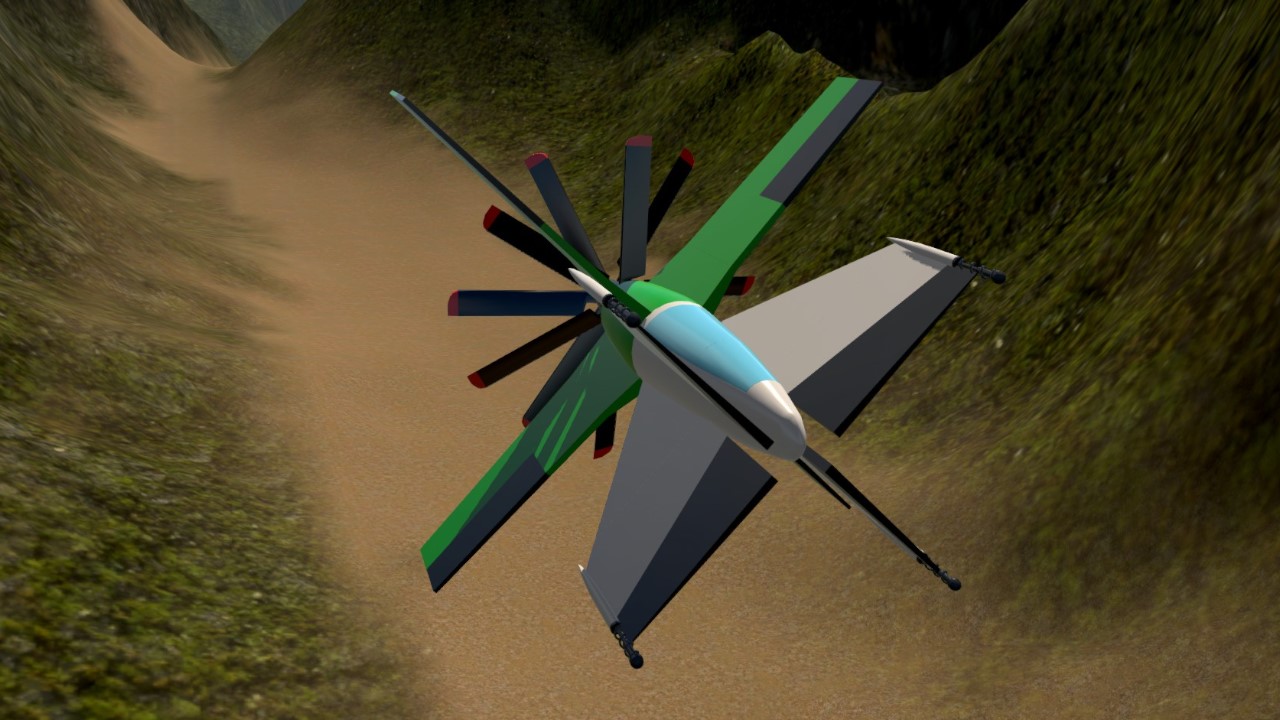
My entry to the challenge. This is the conclusion to my recent experiment with tailsitter VTOLs. The plane features a PW 207 engine, which develops 700 hp. The prop wash is simulated by the rotor behavior. The pilot does not sit in the plane but lies prone instead. This posture will allow the pilot to endure much higher G loads. However, the pilot must put on a VR headset to see the world outside, as the cockpit has no windows. The control scheme is also weird. Due to the high yaw authority, the roll axis has been assigned to the yaw. The plane would auto-level itself via funky trees. Fortunately, the landing process is highly assisted by the funky trees.
Even though the challenge requested a Group B rally car, this plane feels more like a super bike than anything. Any minor mistake will result in a deadly crash due to its immense speed. I am not sure if this plane will be disqualified due to its weird nature. I think the only practical part of this design is its VTOL capability.
Specifications
General Characteristics
- Predecessor [Challenge] Le Rallye du Ciel Grand Prix
- Created On Windows
- Wingspan 19.2ft (5.8m)
- Length 19.2ft (5.8m)
- Height 20.0ft (6.1m)
- Empty Weight 3,097lbs (1,405kg)
- Loaded Weight 3,813lbs (1,729kg)
Performance
- Power/Weight Ratio 8.126
- Wing Loading 10.2lbs/ft2 (50.0kg/m2)
- Wing Area 372.7ft2 (34.6m2)
- Drag Points 4967
Parts
- Number of Parts 79
- Control Surfaces 8
- Performance Cost 590

Speed 9.5/10
Handling 10/10
Fuel efficiency 5/10
bonus for livery/design 10/10
Class-1
1% fuel = 3 roughly seconds
Max fuel time = roughly 5 mins
(I'll regrade this if I feel like I need too after seeing newer submissions.)