
Welcome everybody!
for the Funky Trees challenge , I decided to revamp my hover Auto pilot found on my AH-1Q , it was quite unstable and couldn't deal with cross wind
the Expression it used was really long and complicated .
FREE TO USE credit or not up to you
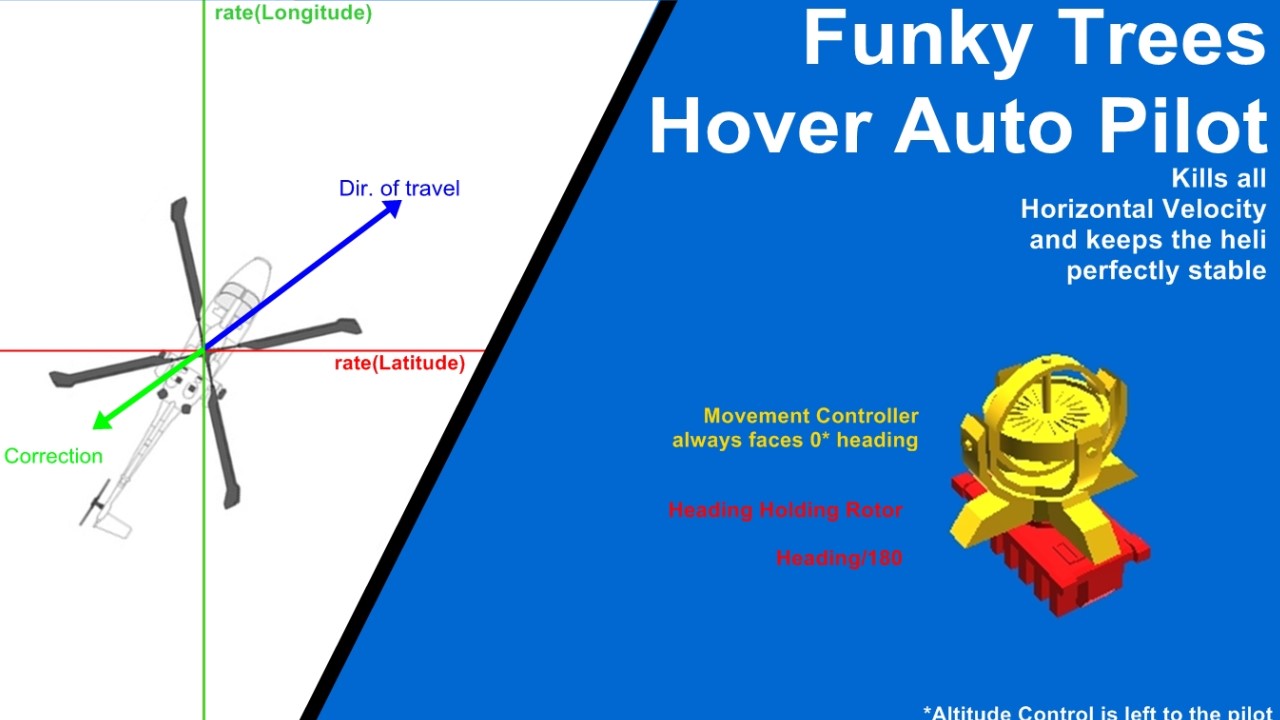
How it works:
with the new Latitude and Longitude , we can now know where your build is on the map , and the fantastic new rate(X) expression is the sole reason this works , the helicopter knows where it is be cause it knows where it was , by subtracting where it was from where it is , it gets a differential , inputting this value in the gyro will counter said differential .
Inputs used:
Pitch input : clamp(rate(Latitude) , -1 , 1)
Roll input : clamp(rate(Longitude) , -1 , 1)
You can change what button you want the hover to engage , by changing the activation group on the Gyro , it is currently set to Activate 2
There is a slight problem though , Latitude and Longitude are global relative , aka they don't change with the heading of your build , we can fix this by adding the second part of this autopilot , The Heading Holding Rotator
Input used:
Heading/180
This rotator must Always be active , removing it will break the gyros output force on the build and not moving it the right direction
HOW TO ATTACH:
grab it by the red Heading Holding Rotator , save it as a subassembly and place it with the exact same rotation values you see in the build , or the Heading Hold won't be holding the right way and will break the autopilot.
HOW TO ADJUST IT:
you trial and error the Gyro Speed and Gyro Stability till it works fine , please note that this basically works well with any values (except 0% duh)
but to get maximum efficiency you need to adjust them , typically Stability is higher than Speed .
Thanks for reading this long description , hopefully this will make helicopter turrets easy to use and maybe even Heli launched Player controlled ATGMs ;)
Specifications
Spotlights
- Minecraftpoweer 5.6 years ago
- EternalDarkness 5.7 years ago
- BaconAircraft 5.7 years ago
- RussianAce 5.7 years ago
- WIZARD2017 5.7 years ago
- Thecatbaron 5.7 years ago
General Characteristics
- Predecessor Funky Trees Challenge
- Successors 1 airplane(s) +532 bonus
- Created On Windows
- Wingspan 0.4ft (0.1m)
- Length 0.8ft (0.3m)
- Height 1.6ft (0.5m)
- Empty Weight 55lbs (25kg)
- Loaded Weight 55lbs (25kg)
Performance
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 0
Parts
- Number of Parts 3
- Control Surfaces 0
- Performance Cost 26

This is amazing! I was going to try this using the AngleOfSlip command and breaking the direction into x and y components to achieve the same effect, but why bother now!
Can this work on hovering vehicles?
@FairFireFlight You Can Use Even Do That With One Part, You Can You
cos(&sin(This best funky free for helicopter/vtol jet ever.
@Bruhmomehtjd gone, reduced to atoms.
Where is the “the missile knows where it isn’t so it knows where it is” copypasta
When I disable the torque stuff from heli rotor part it still tends to yaw left now why is that?
This is practically an in-game computer
It don't work un Mobile
I figured it out. You take another gyro make everything zero and disabled except for yaw power and yaw input. You put in clamp(YawRate, -1 ,1) and then you invert it @FairFireFight
@ChisP sorry i dont know
Hey, I am looking to see if there is any way to limit yaw as well. I have a VTOL gunship where a minigun rotates and it causes the plane to drift yaw right while hovering. Is there any way to cancel it out?
It works, thanks!@FairFireFight
@WIZARD2017 try reducing the pitch range , I would've asked for an unlisted but I don't have a PC anymore.
I’m having a little problem, mate. When my heli stop decelerating, it waves backward and forward, not so stable. I increased the stable to 200% and still not working well.
@FairFireFight I’m wondering if you can make the NASA AD-1 Oblique Wing.
I forgot to spotlight. I naw gib spotlight kthx
is that a Lynx in your screenshot?
i mean title image idk how to call that lol
Lynx the helicopter
@SnoWFLakE0s Ah. Yeah I suppose that’s true. For acceleration rate(speed) seems to not work very well at times. With angular rates for example, I learned that I need to use rate(rate(PitchAngle)) instead of rate(PitchRate).
@spefyjerbf
.
Due to some issues, rate(anyspeedvar) is kind of broken right now. Regardless, thinking in terms of predefined X-Y-Z components makes things a lot easier, because now you don't have to consider frames of reference.
Ooh.
rate(Latitude)is a pretty nice way to express velocity components. What advantages does this method have over using trig to get your velocity components? It does look simpler code-wise, which I suppose is a pretty nice advantage.Also, does this work for massive bulky hard to move helicopters? I’m using the AS-HL-9 and I want it to be easier to pick up cargo as it’s hard to 1. Stop it after it picks up some speed, 2: maneuver it as centered as possible over the cargo or craft. It likes to drift a little bit and it’s hard to tell what angle it’s at because I put a camera on the magnet area to help me center myself.
Does this work if the helicopter already has a gyro built in for stability?
this will come in handy ;)
@Chancey21 you can hold your altitude manually waaay easier than sideways velocity
If I had to include altitude hold then I would Have to implement some sort ascend/descend function , and wouldn't be easily apply-able to any helicopter , unlike this